DJI-Login
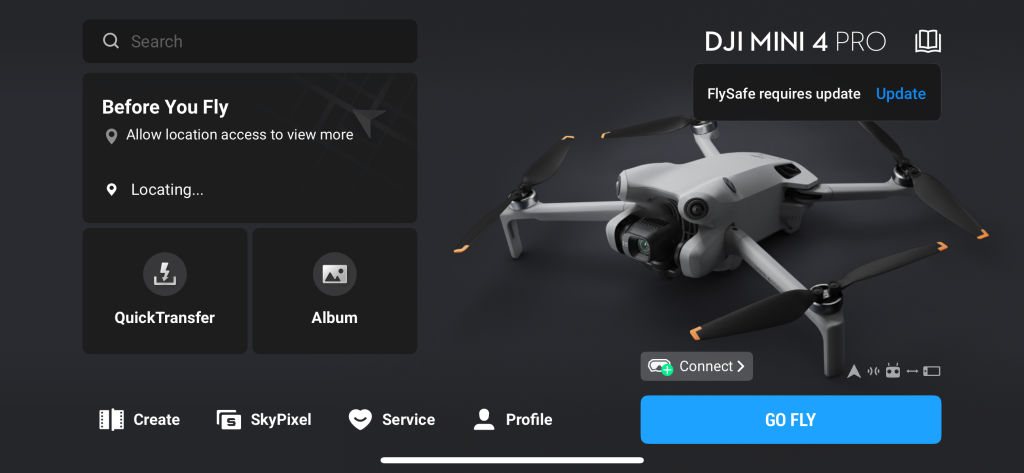
Stellen Sie sicher, dass Sie mit einem DJI-Konto angemeldet sind. Die DJI Fly-App erlaubt keine Flüge mit automatischer Mission, wenn Sie nicht angemeldet sind.

GPS
Stellen Sie vor der Planung einer Mission sicher, dass Sie über ein ausreichendes GPS-Signal verfügen.
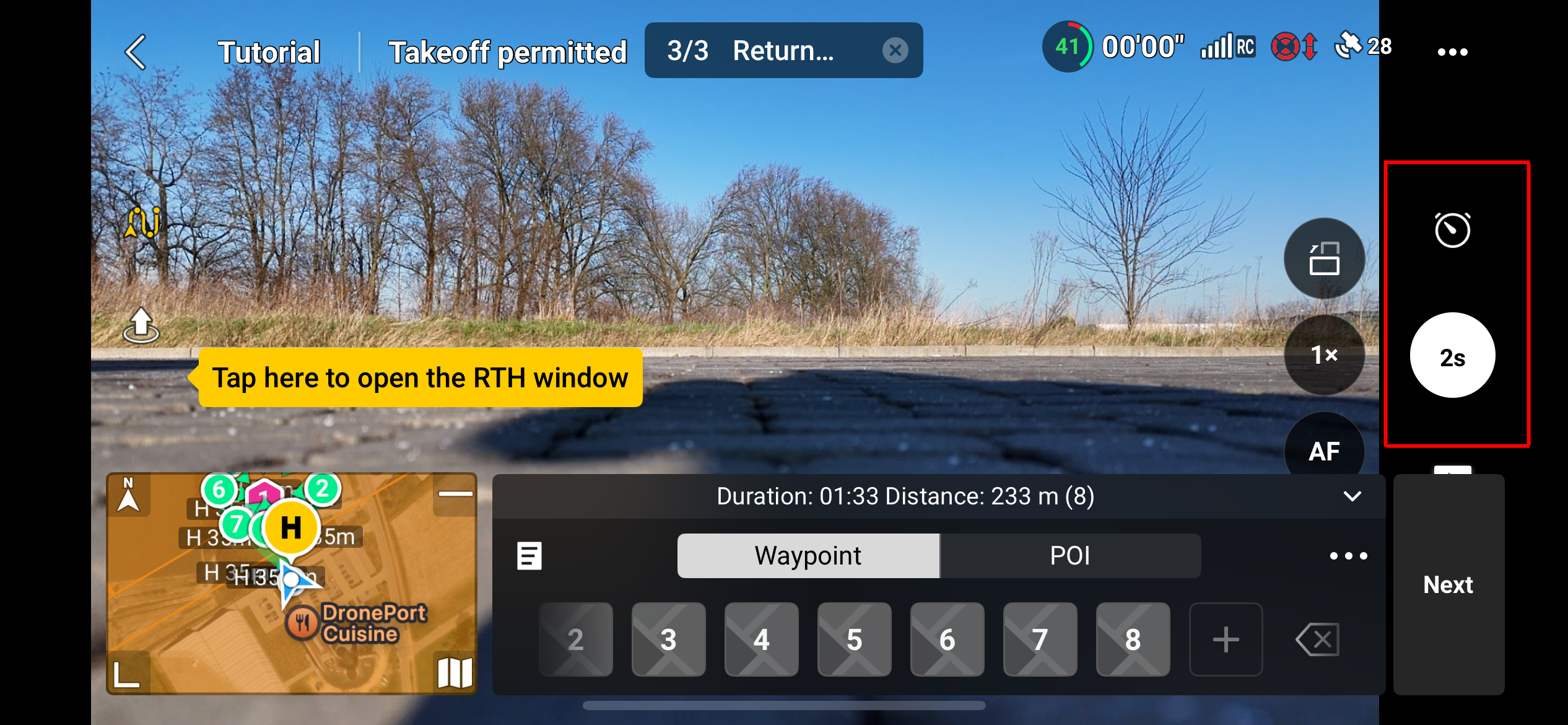
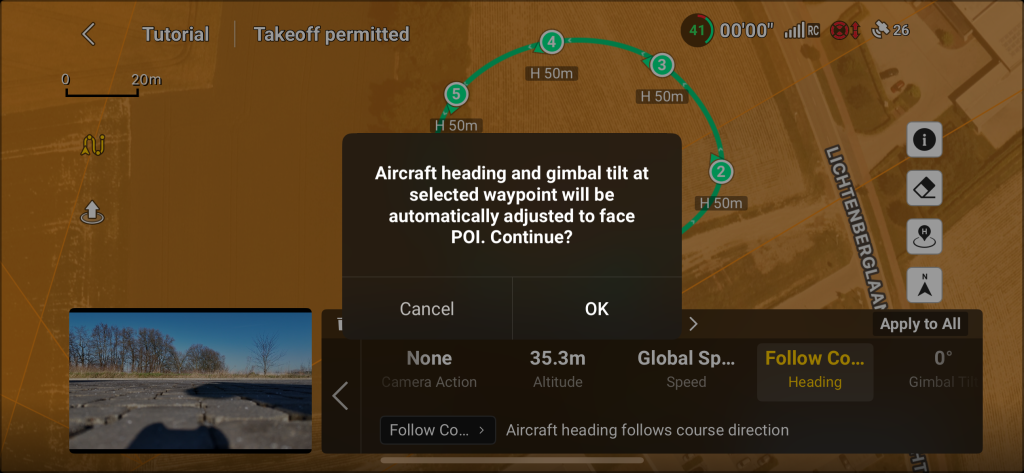
Überprüfen Sie das GPS-Symbol oben rechts auf dem Bildschirm. Es muss weiß und nicht rot sein. ![]()
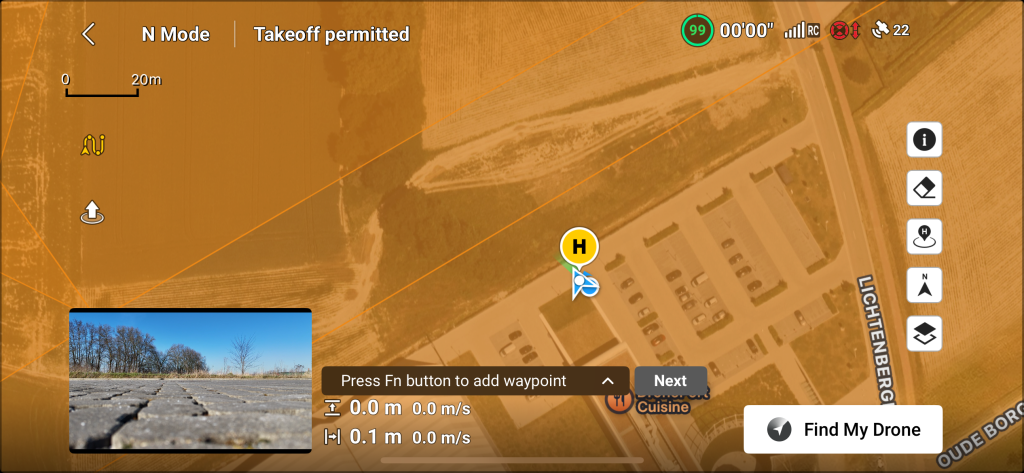
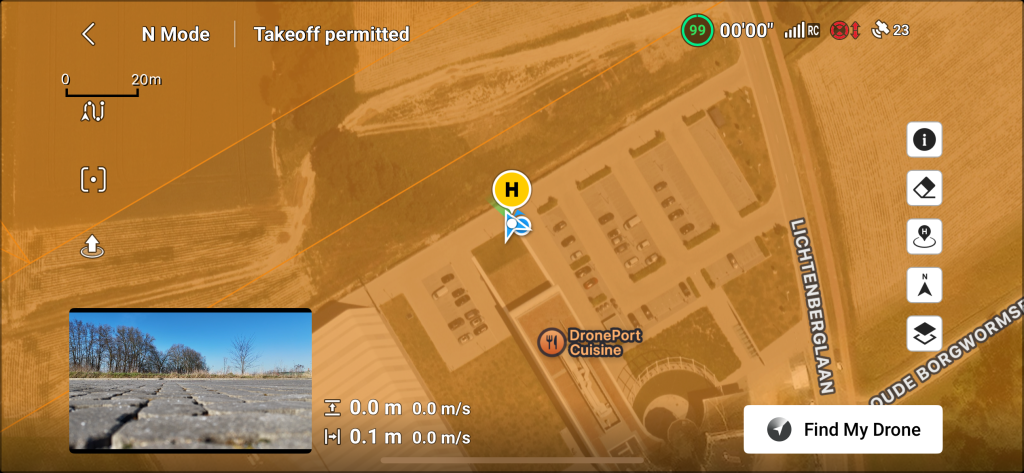
Ausgangsposition
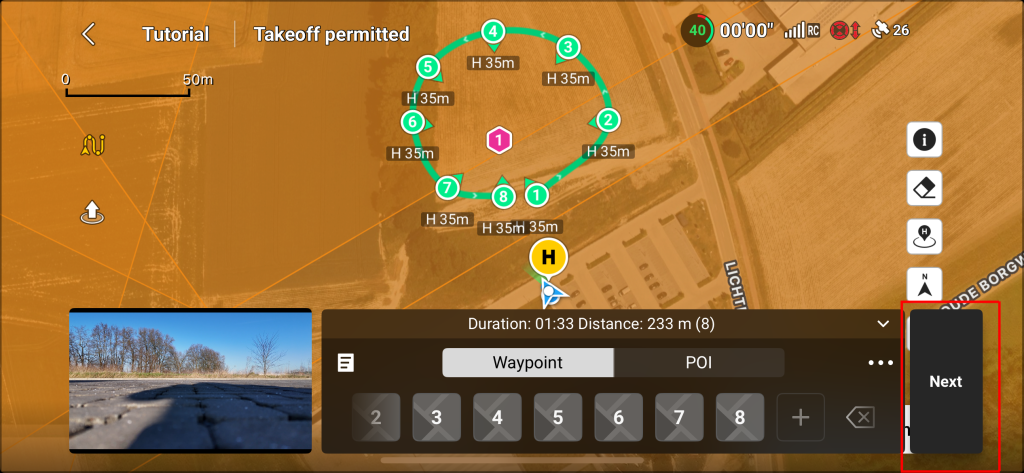
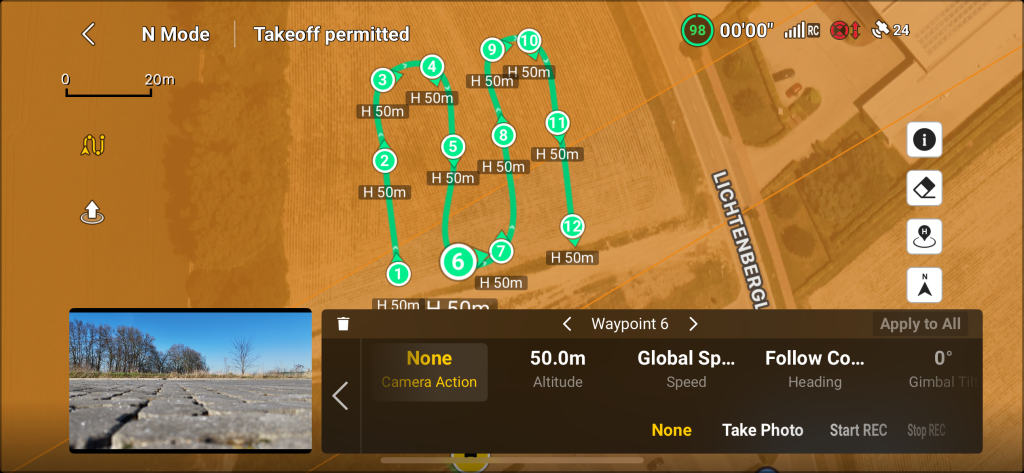
Stellen Sie vor der Planung sicher, dass die Drohne eine Home-Position aufgezeichnet hat. Die Drohne hat ihre Home-Position aufgezeichnet, wenn das Symbol im Bild unten auf der Karte sichtbar ist. 




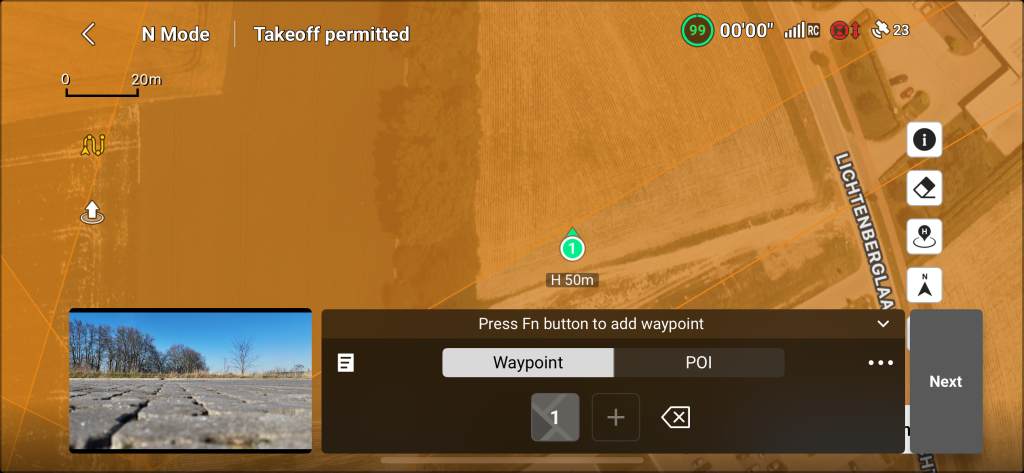
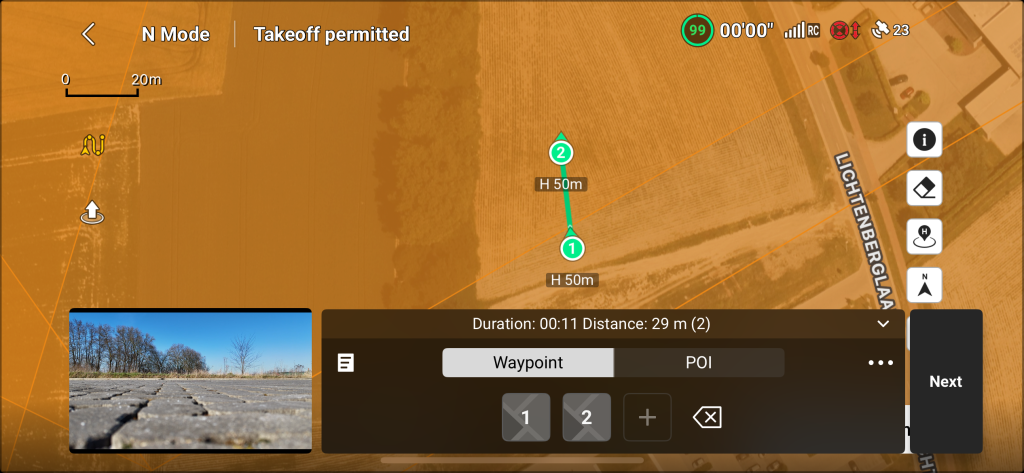
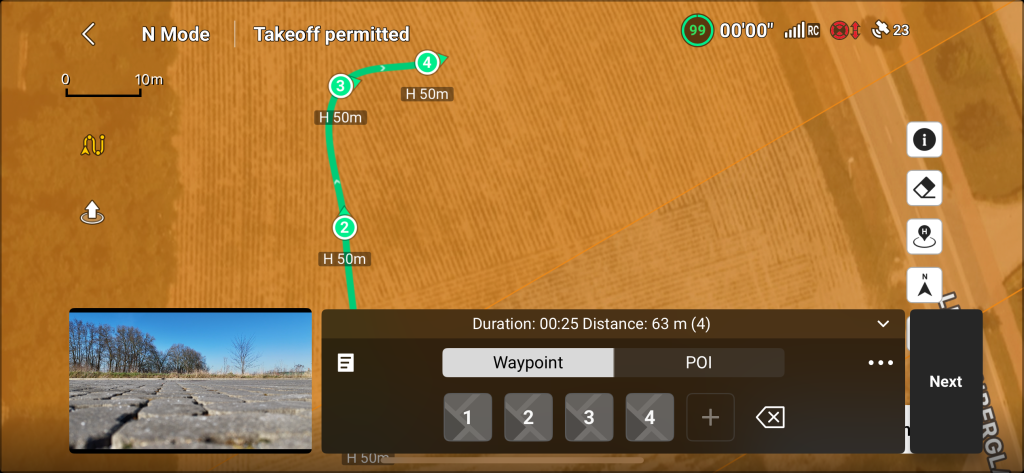
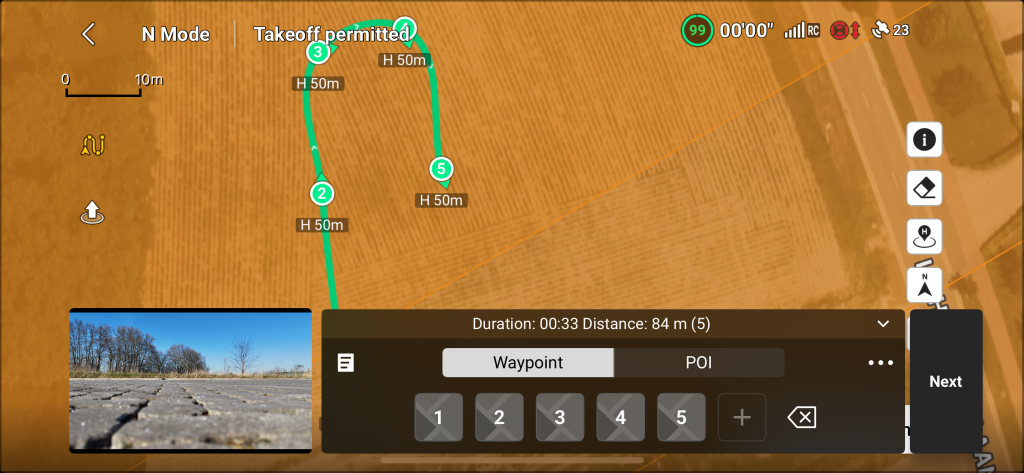

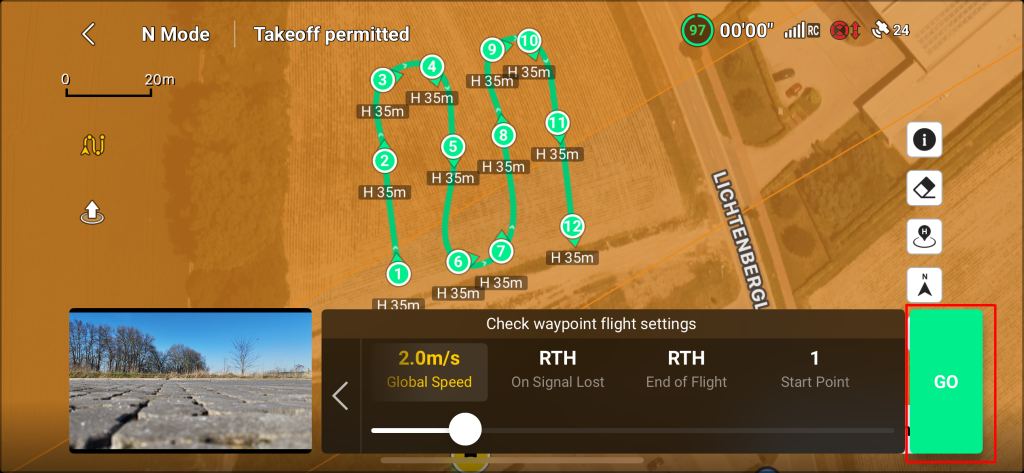


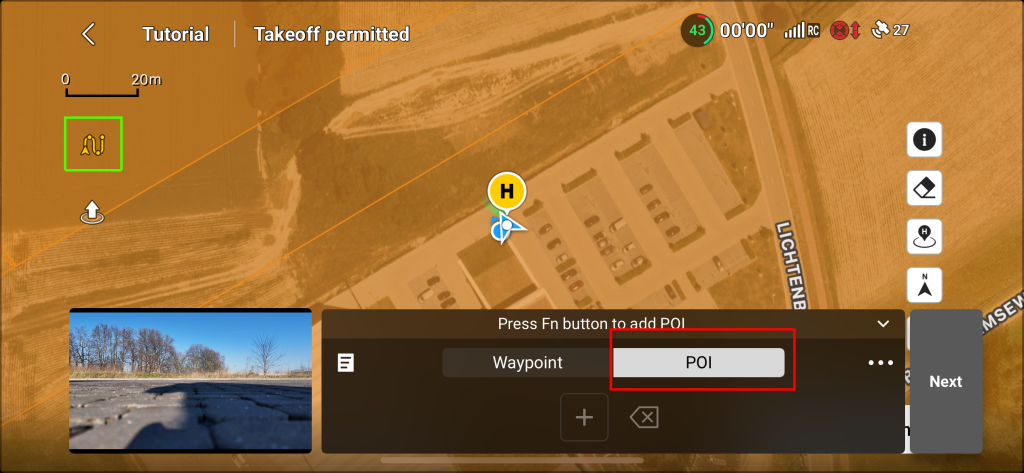



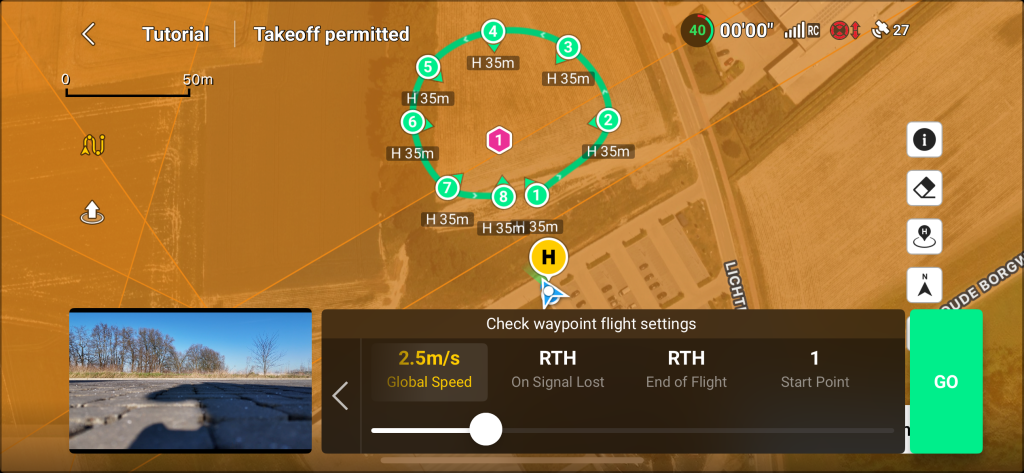
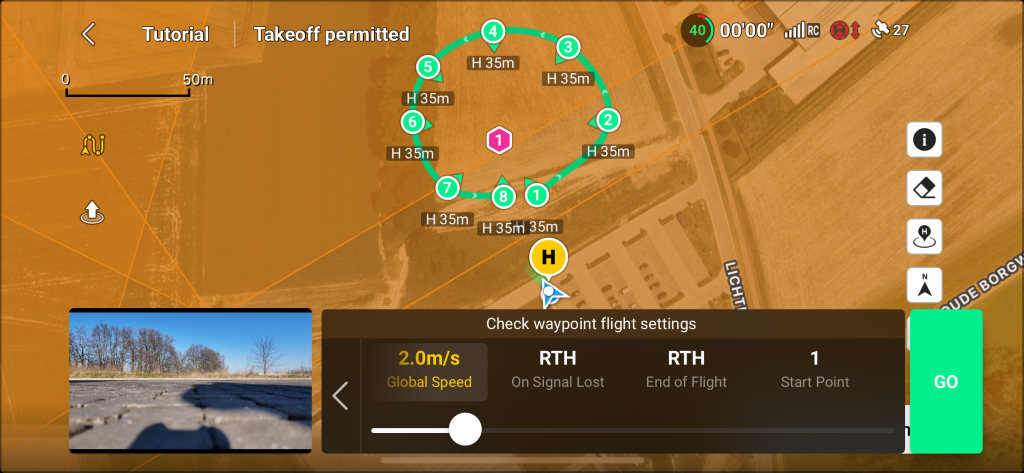
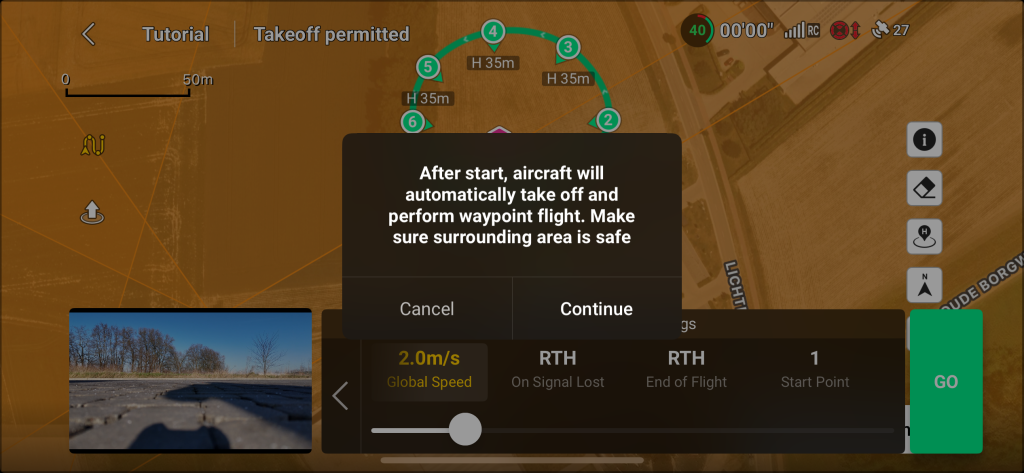
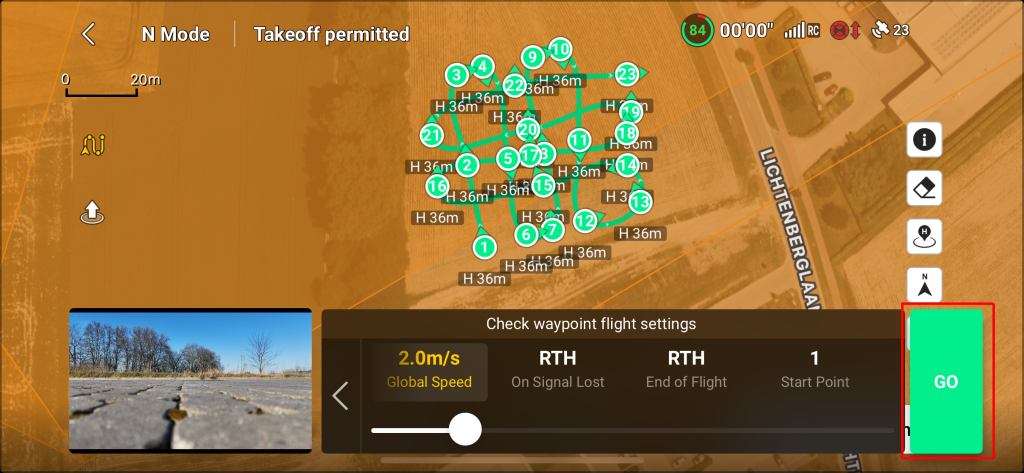
Wir sind jetzt bereit zum Abflug, bitte: