DJI Login
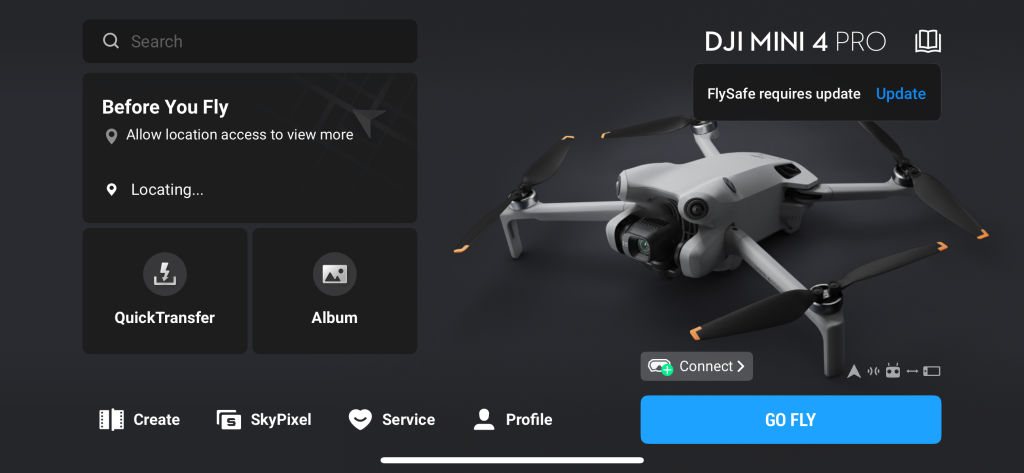
Upewnij się, że jesteś zalogowany na konto dji. Aplikacja Dji fly nie pozwoli na lot z automatyczną misją, jeśli nie jesteś zalogowany.

GPS
Przed zaplanowaniem misji upewnij się, że masz wystarczający sygnał GPS.
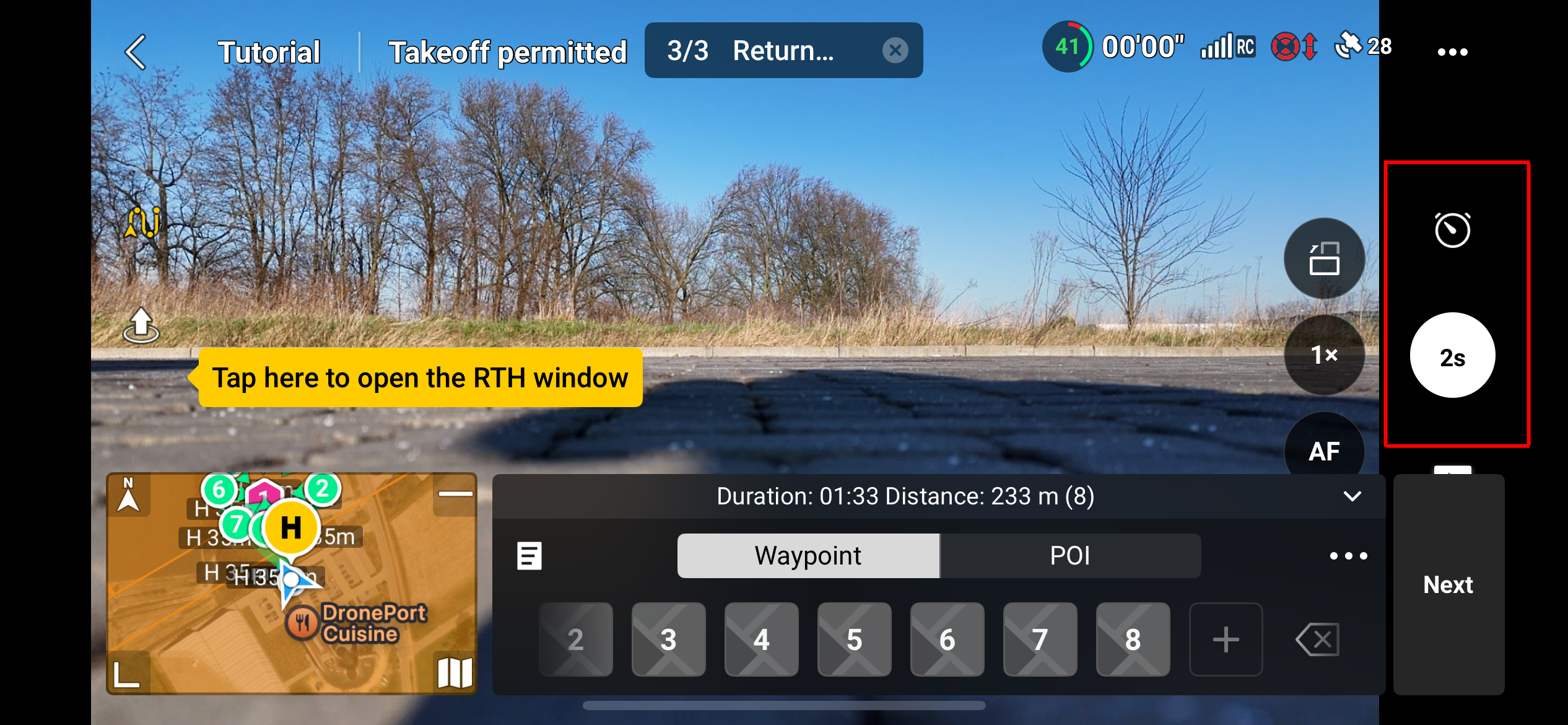
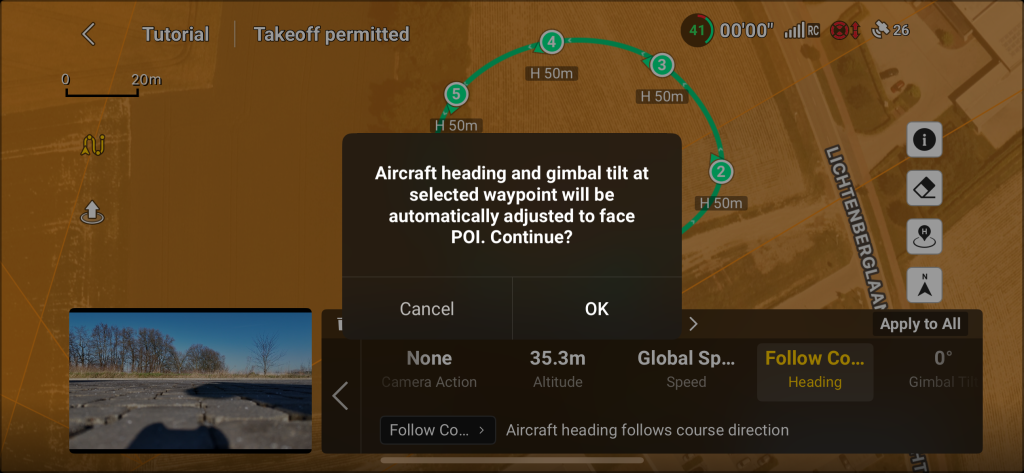
Sprawdź ikonę GPS w prawym górnym rogu ekranu. Musi być w kolorze białym, a nie czerwonym. ![]()
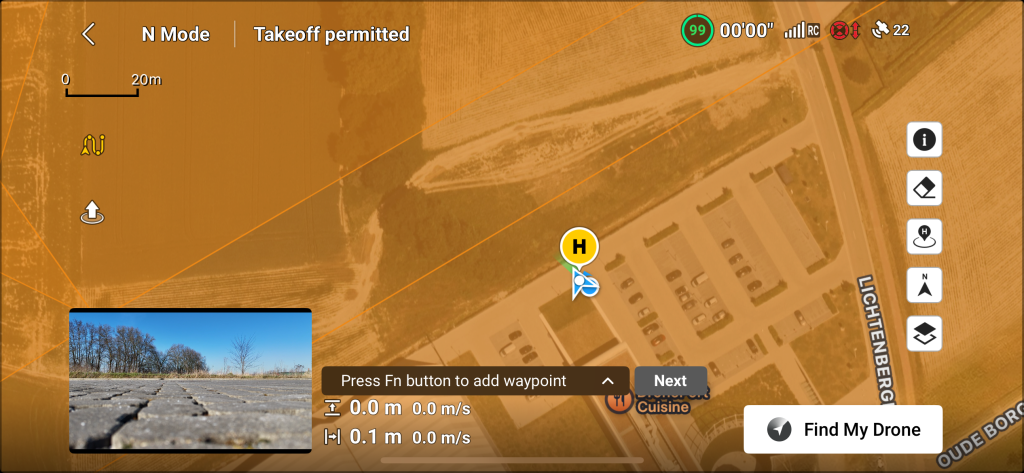
Pozycja wyjściowa
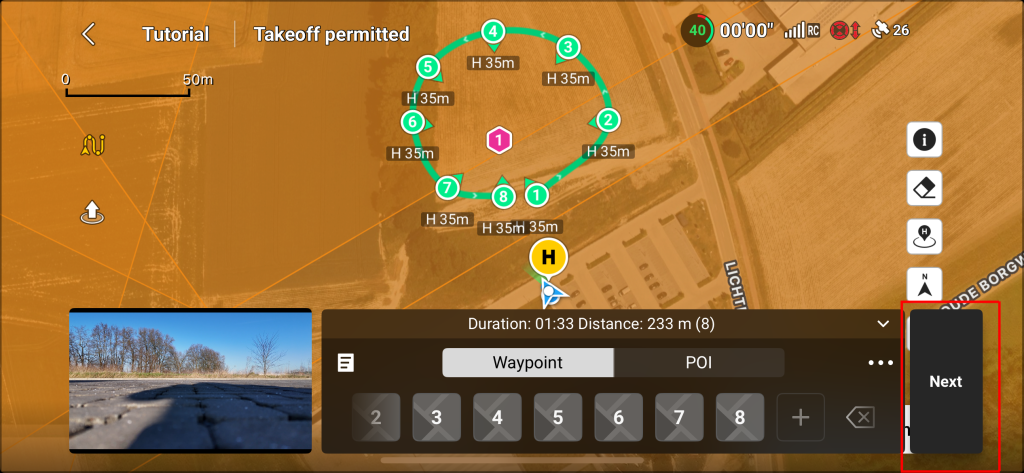
Przed rozpoczęciem planowania upewnij się, że dron zarejestrował pozycję domową. Dron zarejestrował swoją pozycję domową, jeśli ikona na poniższym obrazku jest widoczna na mapie. 




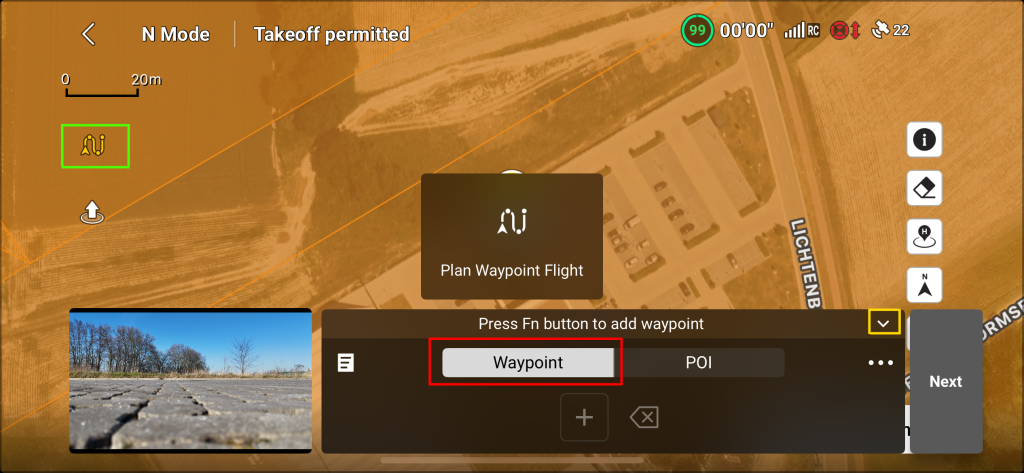
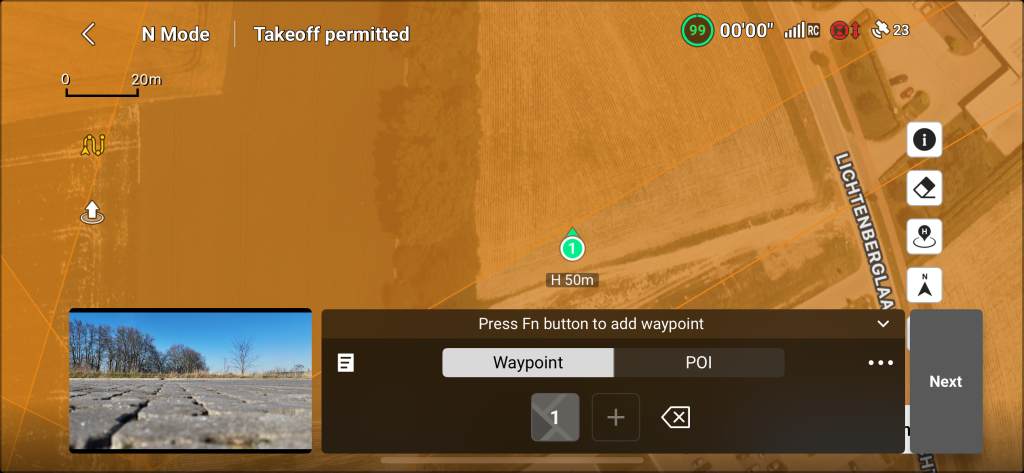
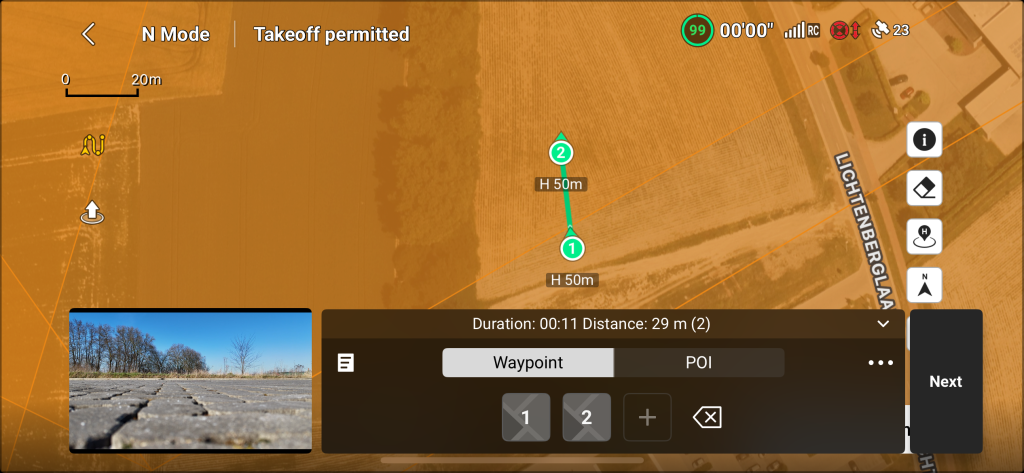

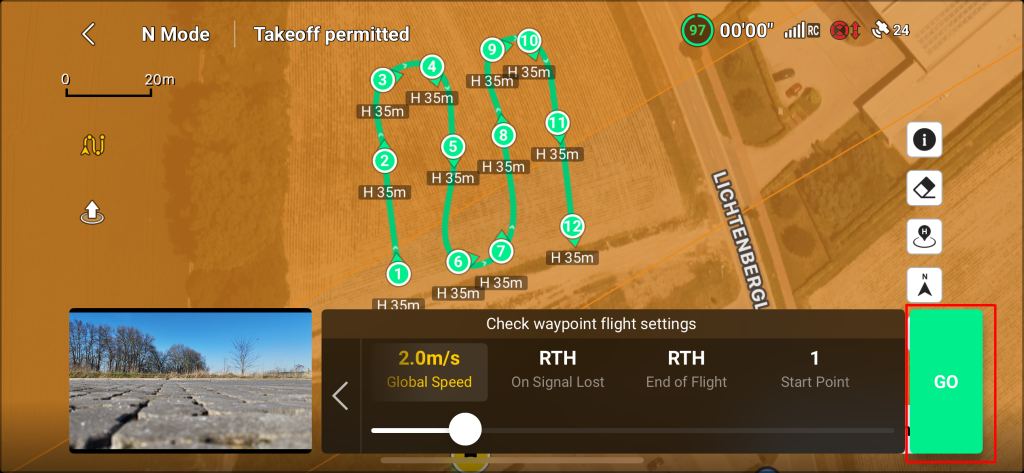
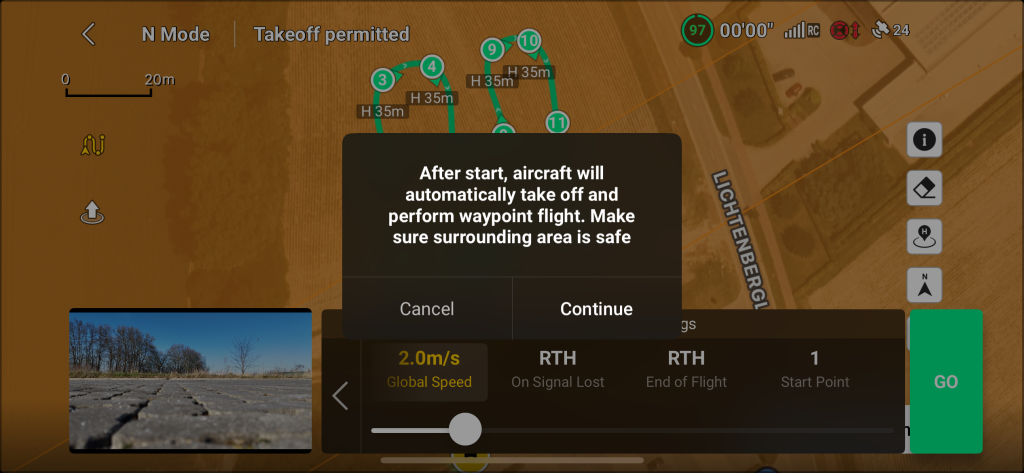
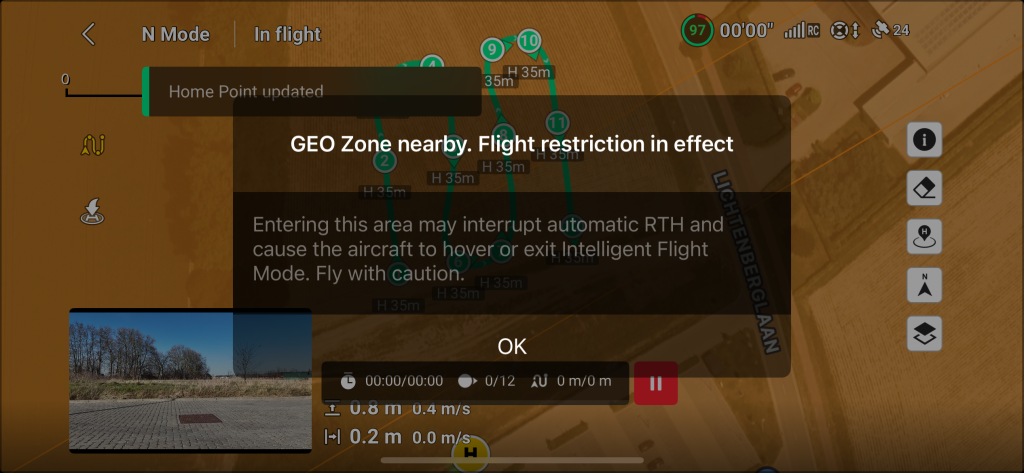


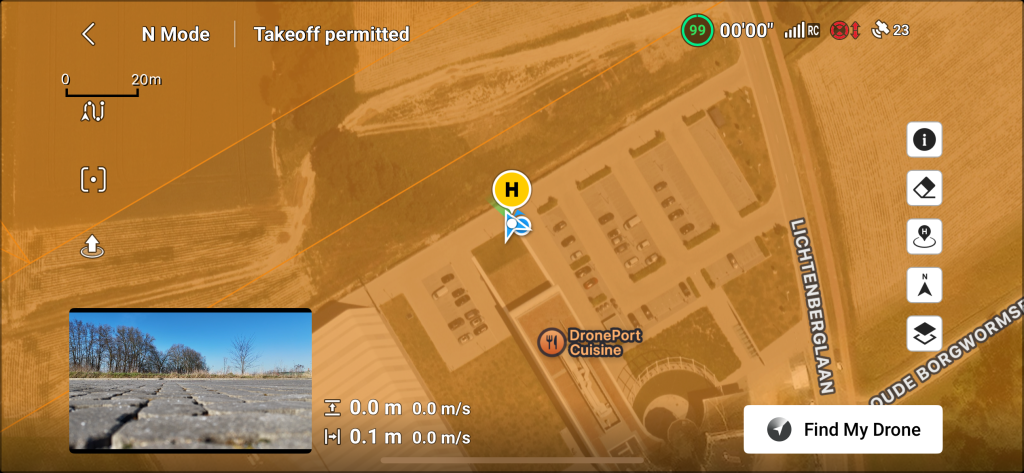



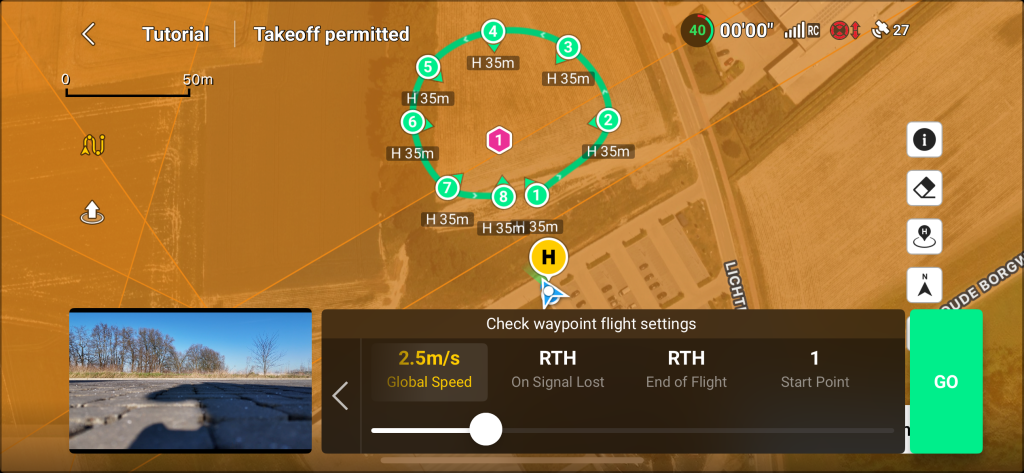
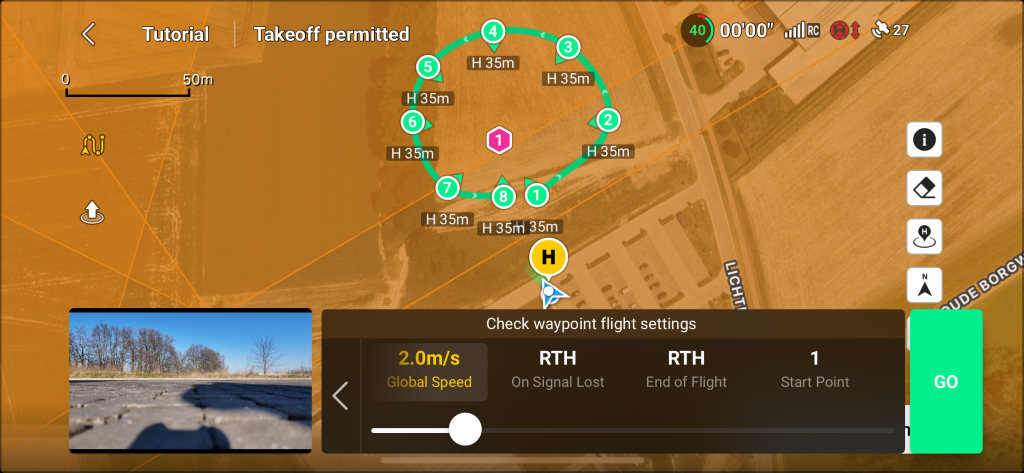
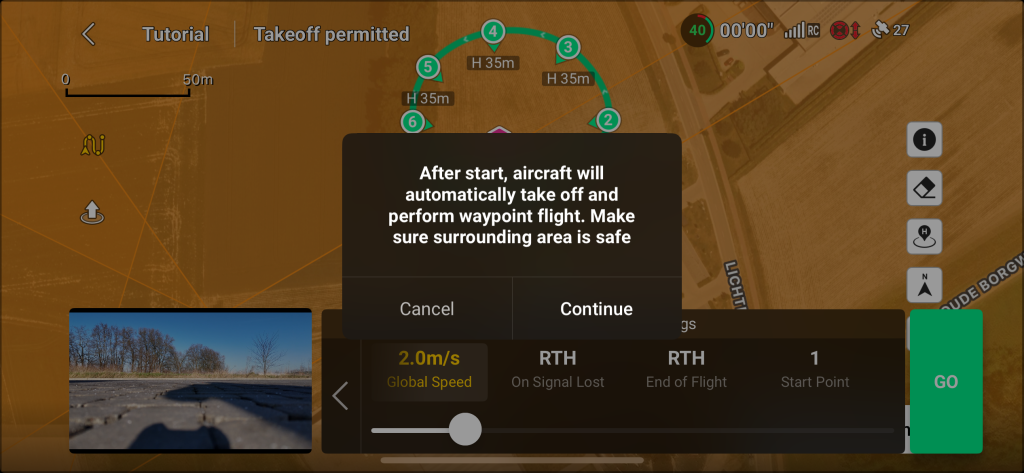
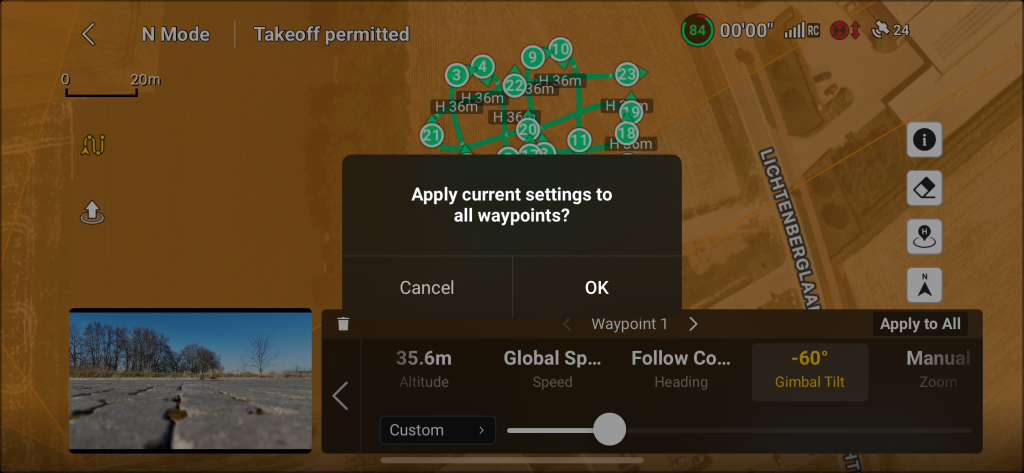
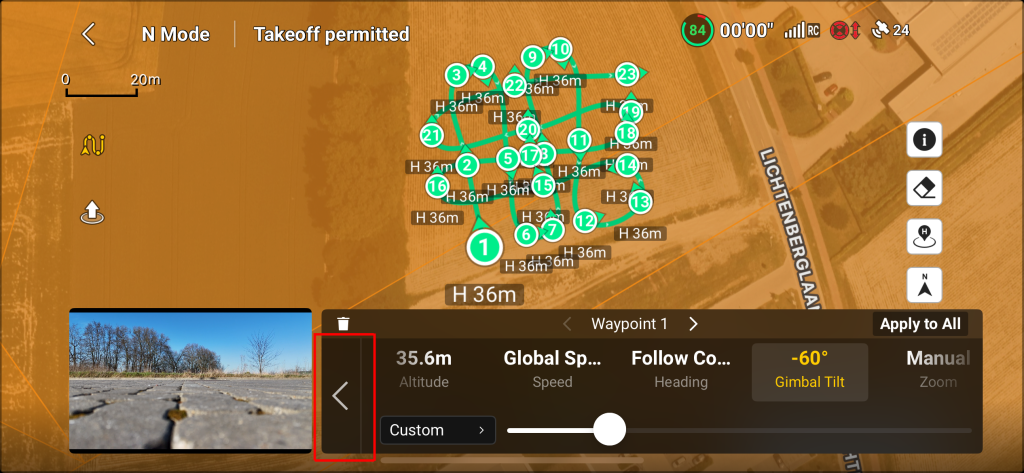
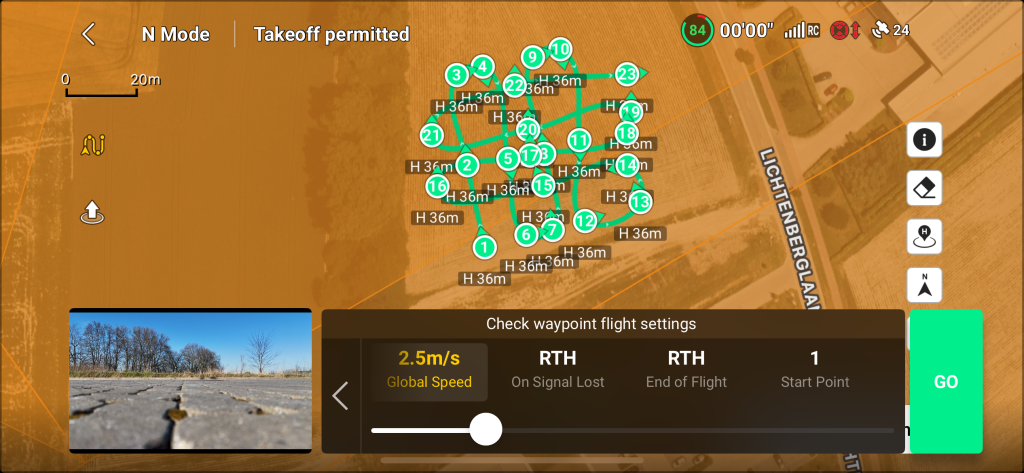
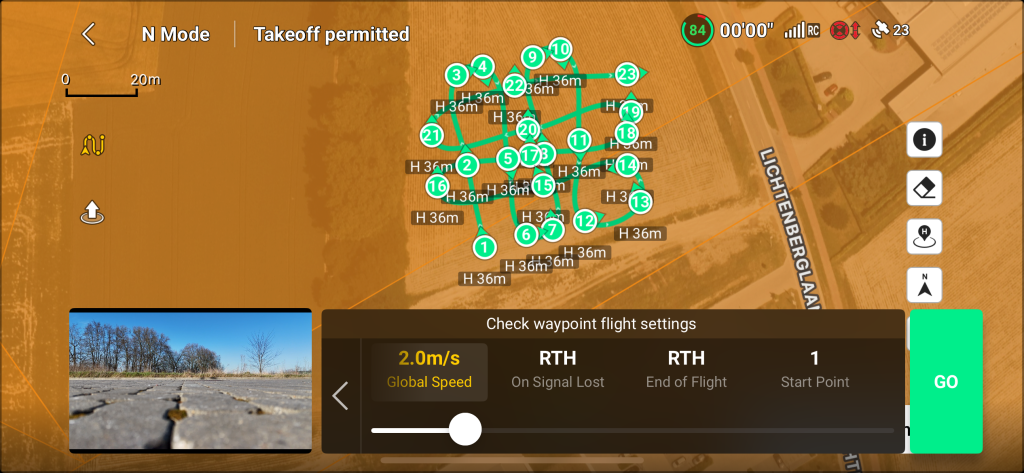
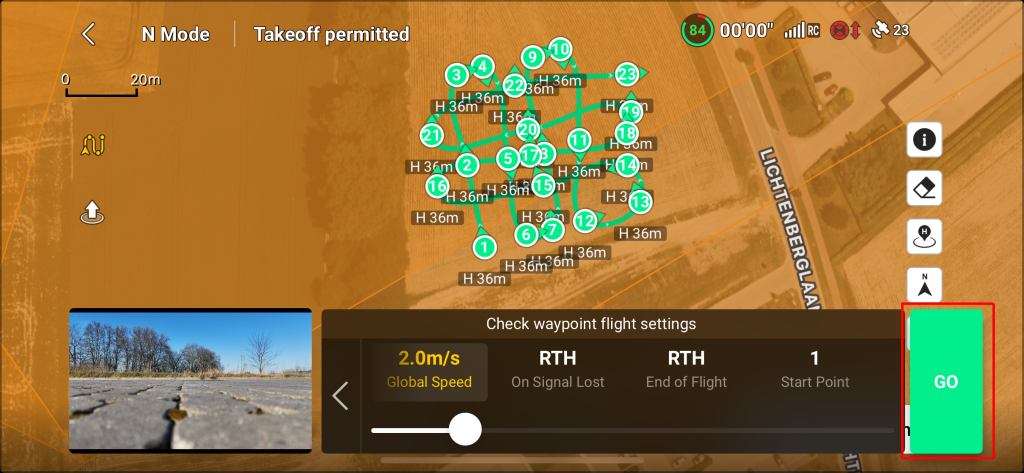
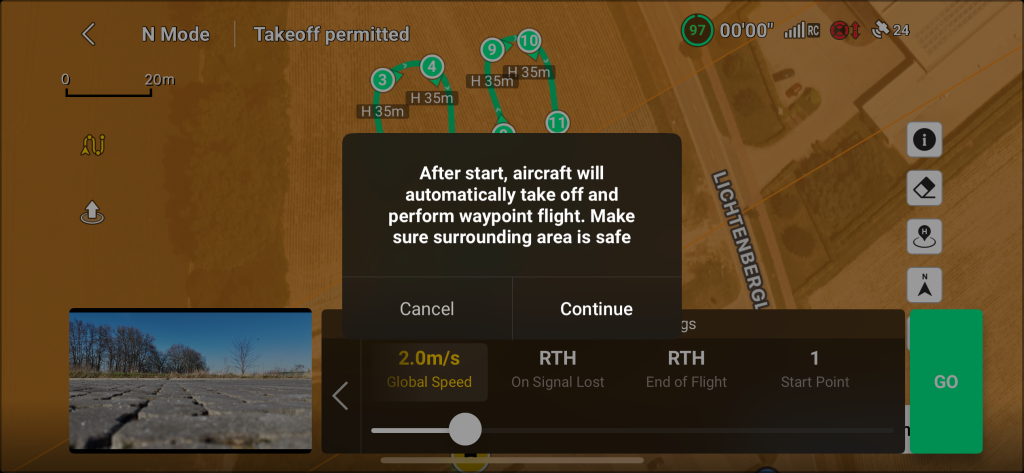
Jesteśmy gotowi do lotu: