Connexion DJI
Assurez-vous d'être connecté avec un compte DJI. L'application DJI Fly ne permettra pas de voler avec la mission automatique à moins d'être connecté.

GPS
Avant de planifier une mission, assurez-vous d'avoir un signal GPS suffisant.
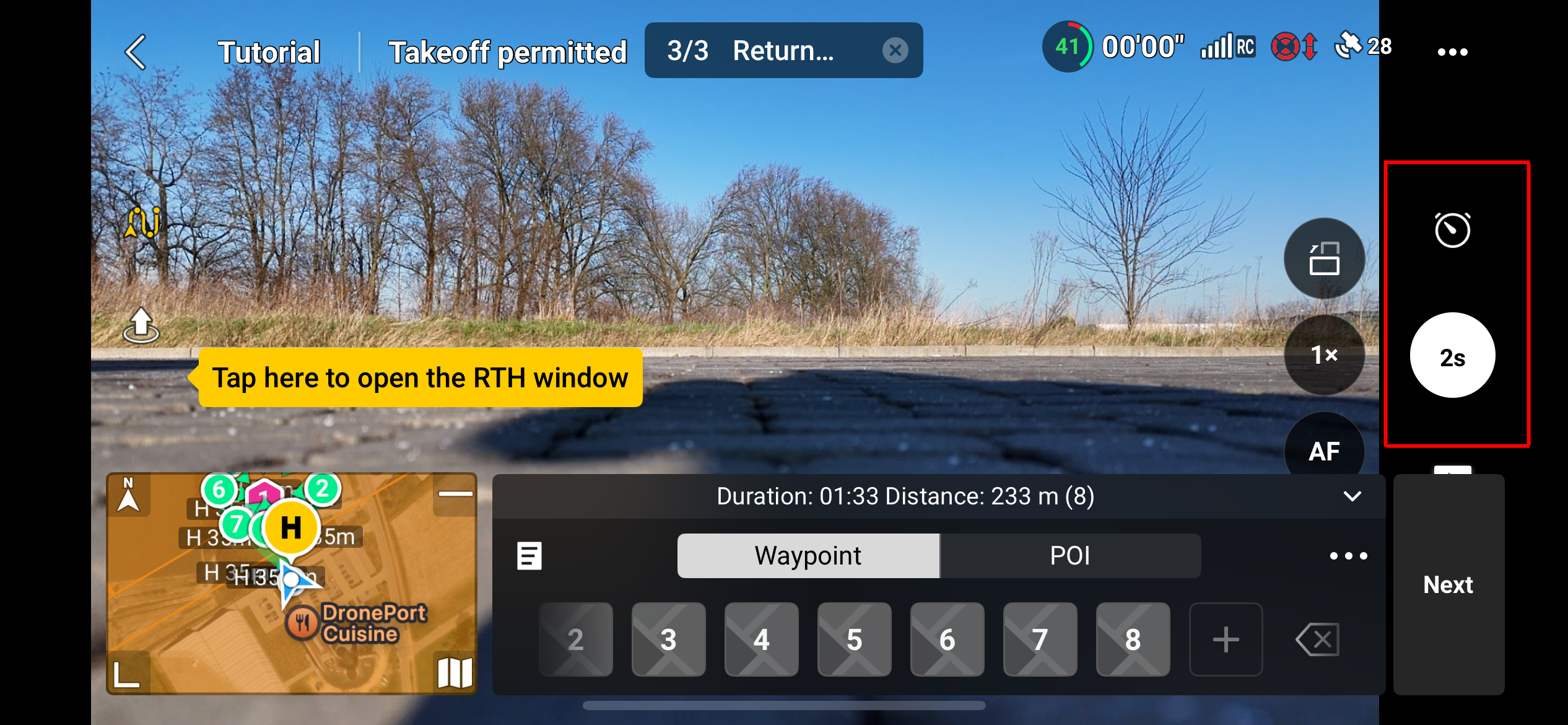
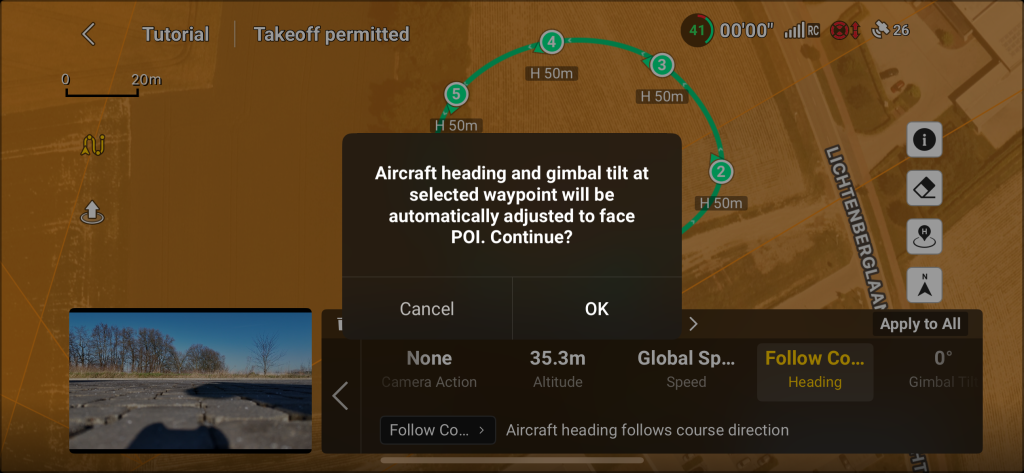
Vérifiez l'icône GPS en haut à droite de l'écran. Elle doit être de couleur blanche et non rouge. ![]()
Position d'origine
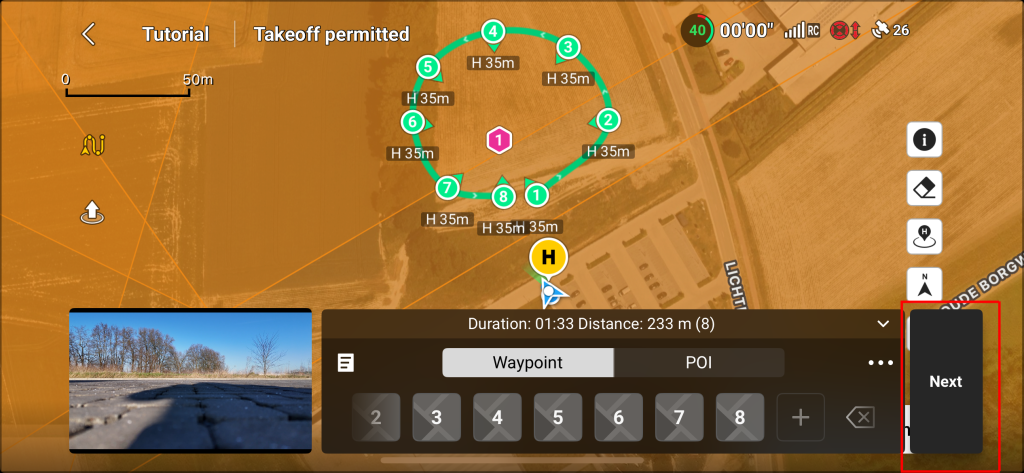
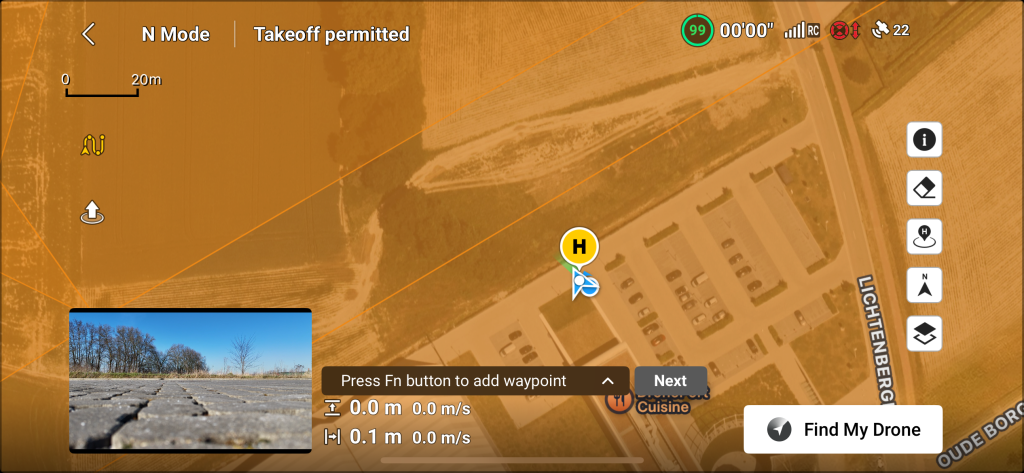
Avant de planifier, assurez-vous que le drone a enregistré une position d'origine. Le drone a enregistré sa position d'origine si l'icône dans l'image ci-dessous est visible sur la carte. 




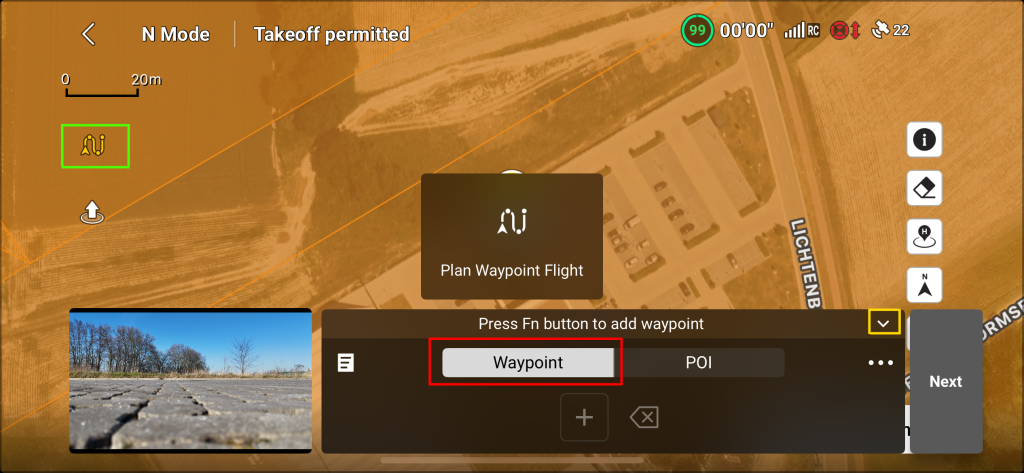
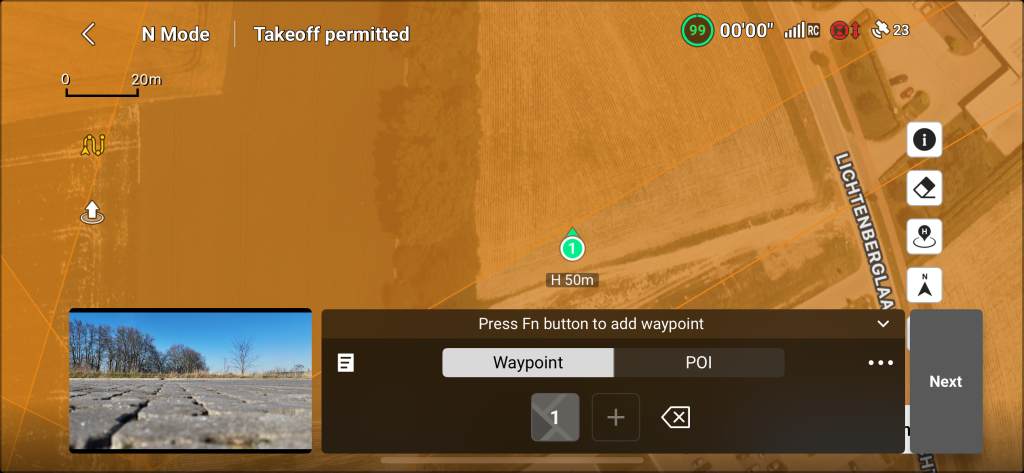
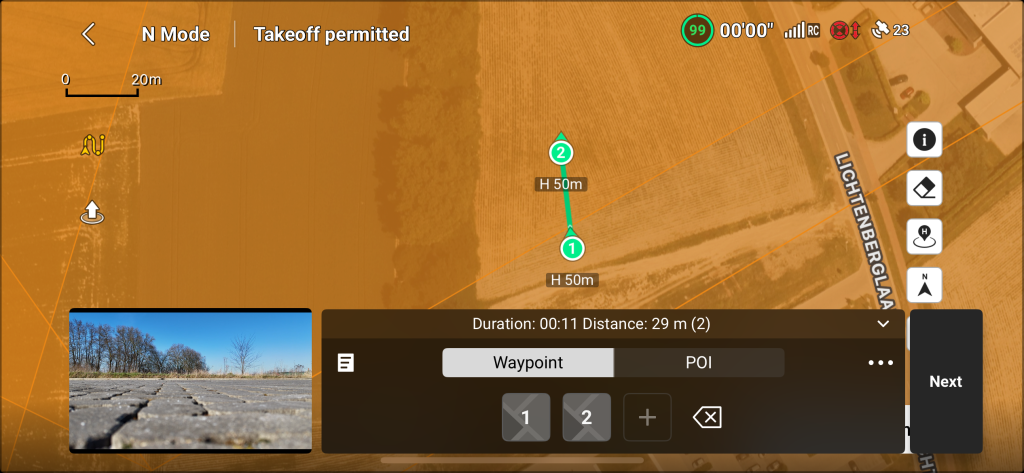
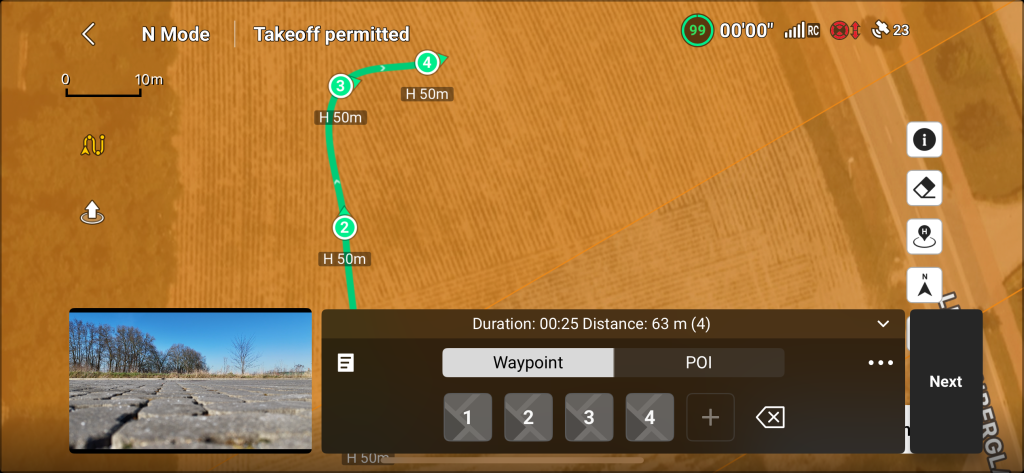
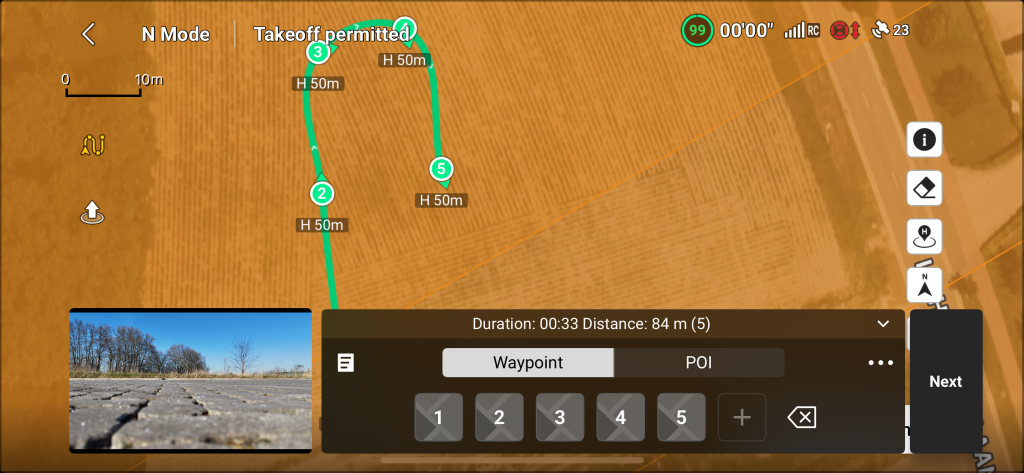

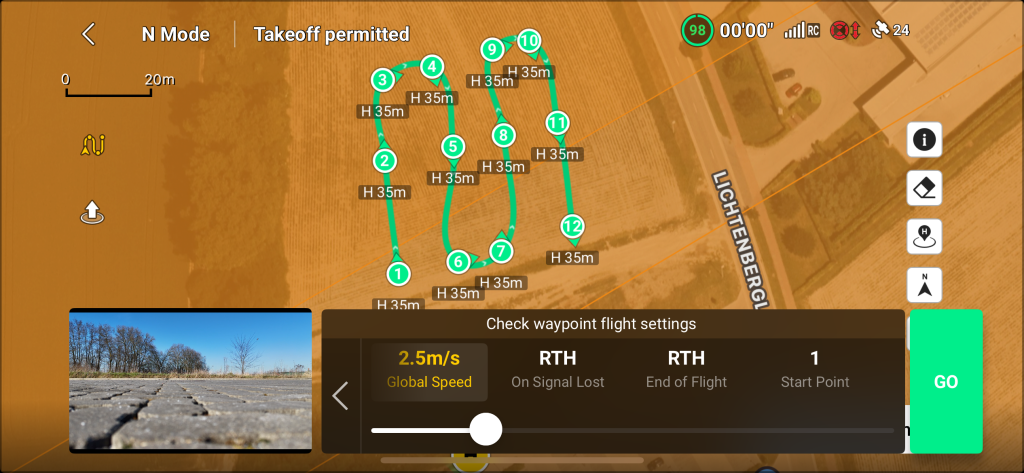
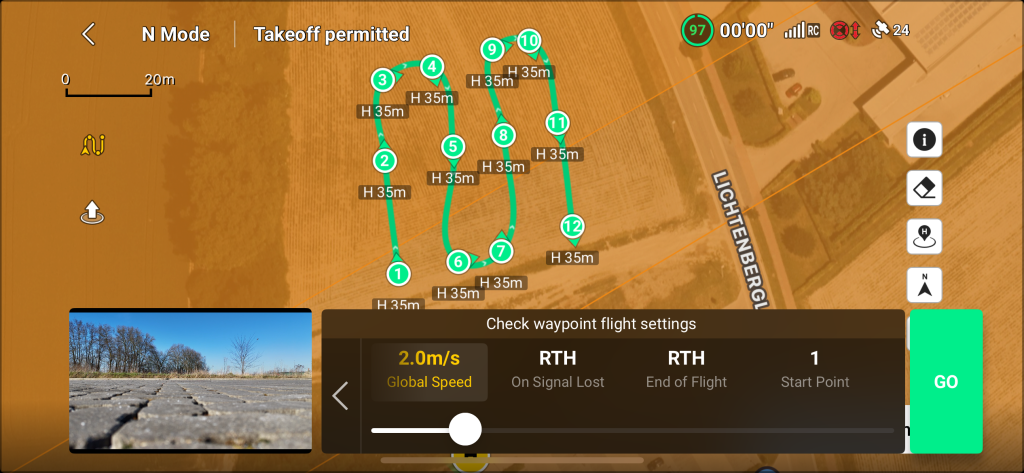
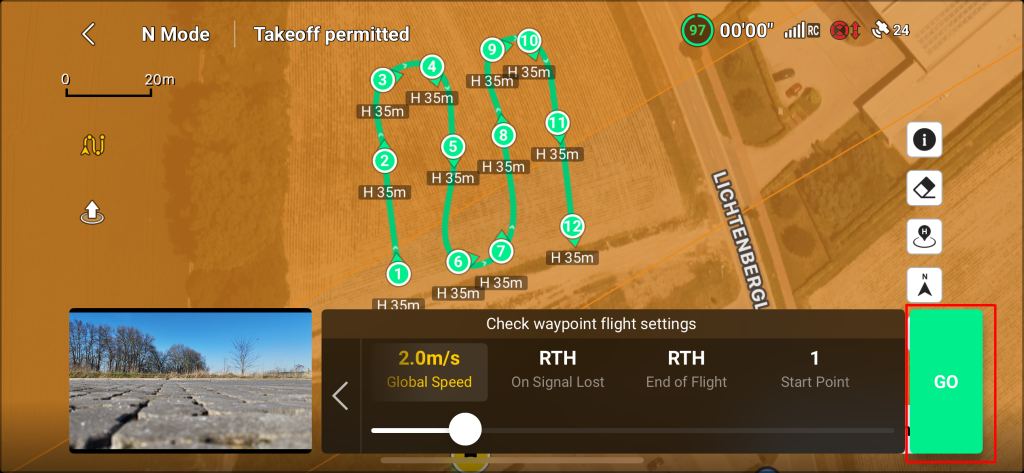
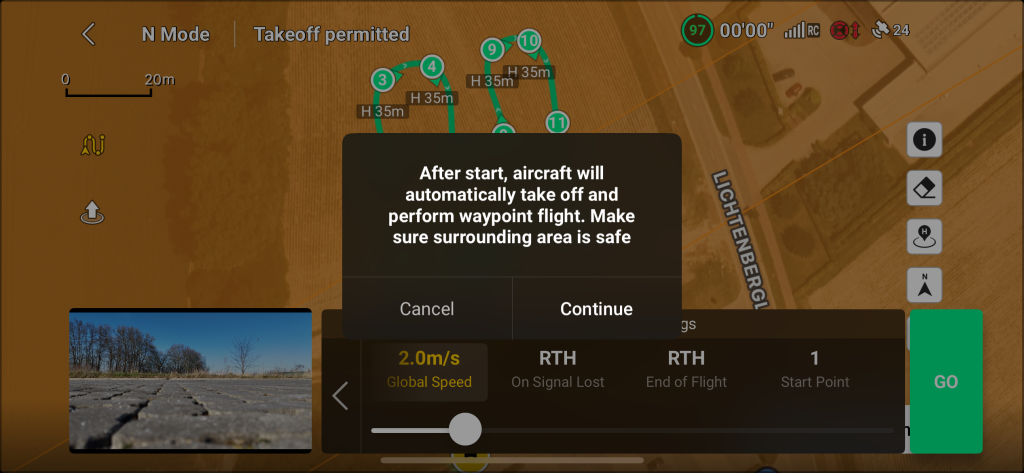


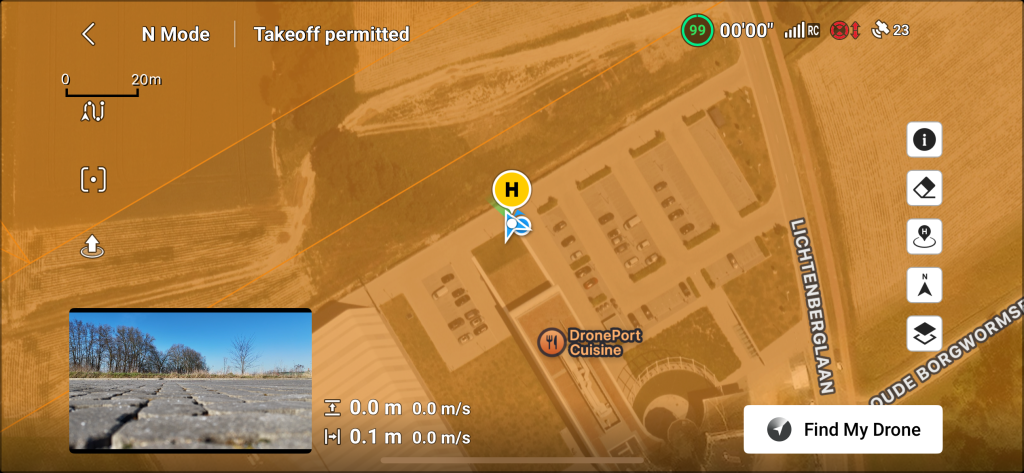
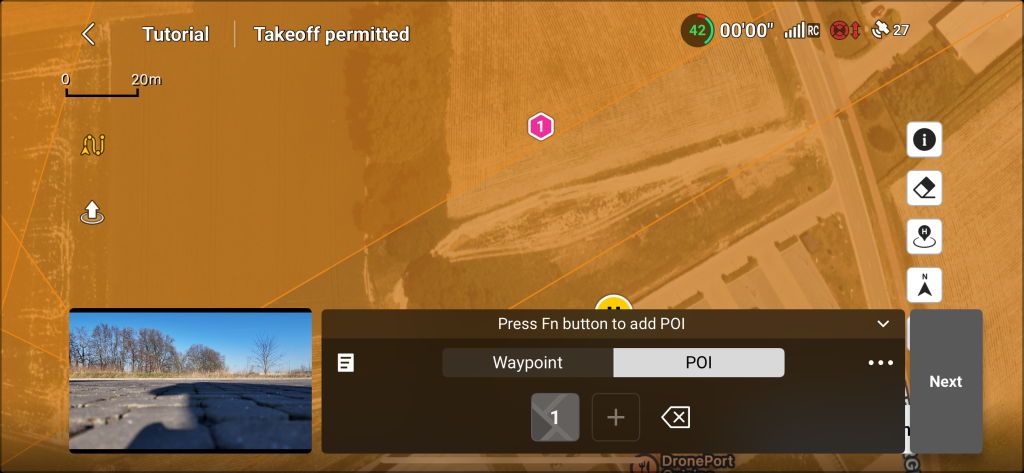



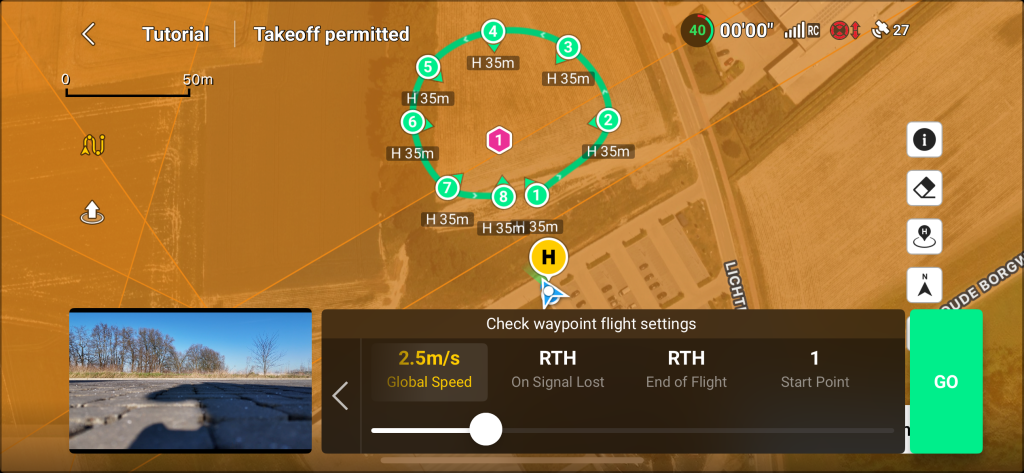
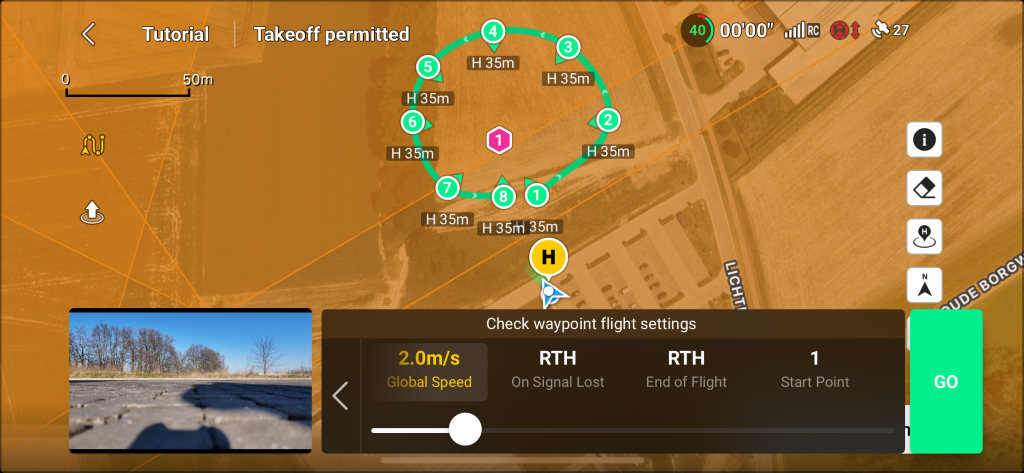
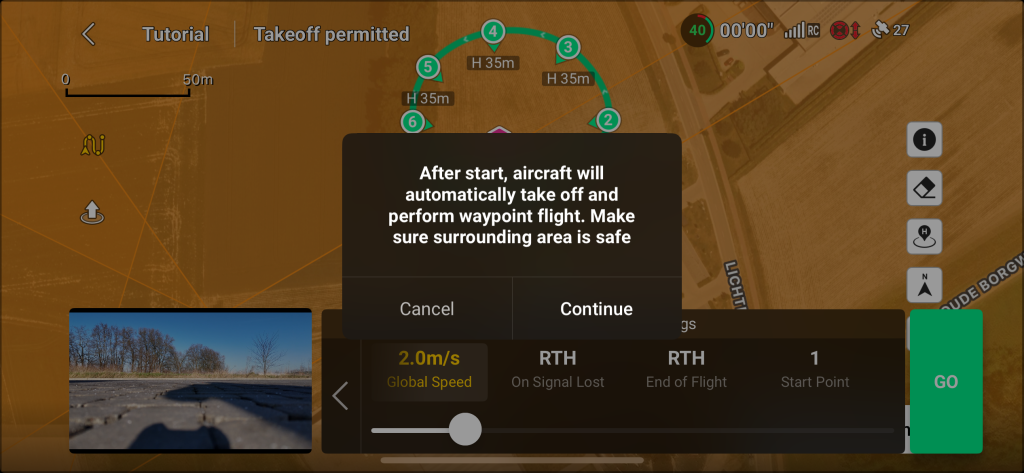
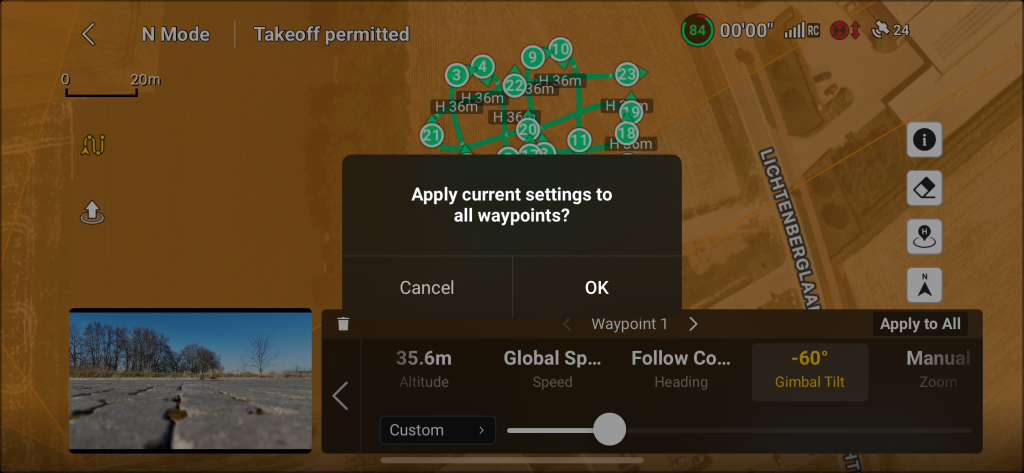
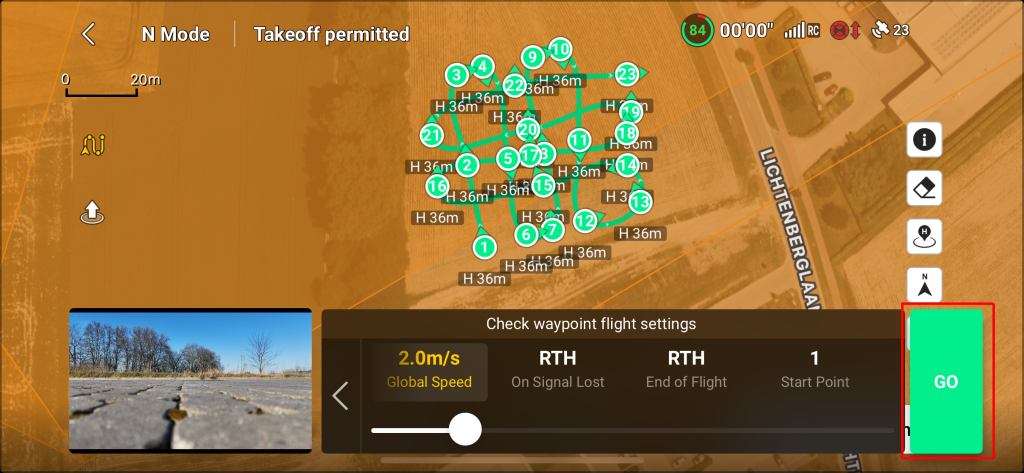
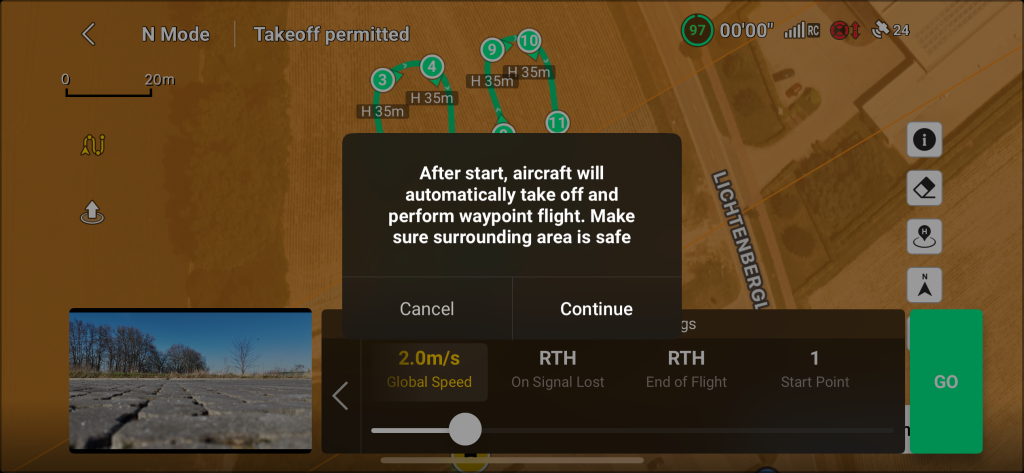
Nous sommes prêts à voler maintenant :