DJI-login
Zorg ervoor dat u bent ingelogd met een DJI-account. De Dji Fly-app staat niet toe om automatische missies te vliegen, tenzij je bent ingelogd.

GPS
Zorg ervoor dat u voldoende GPS-signaal heeft voordat u een missie plant.
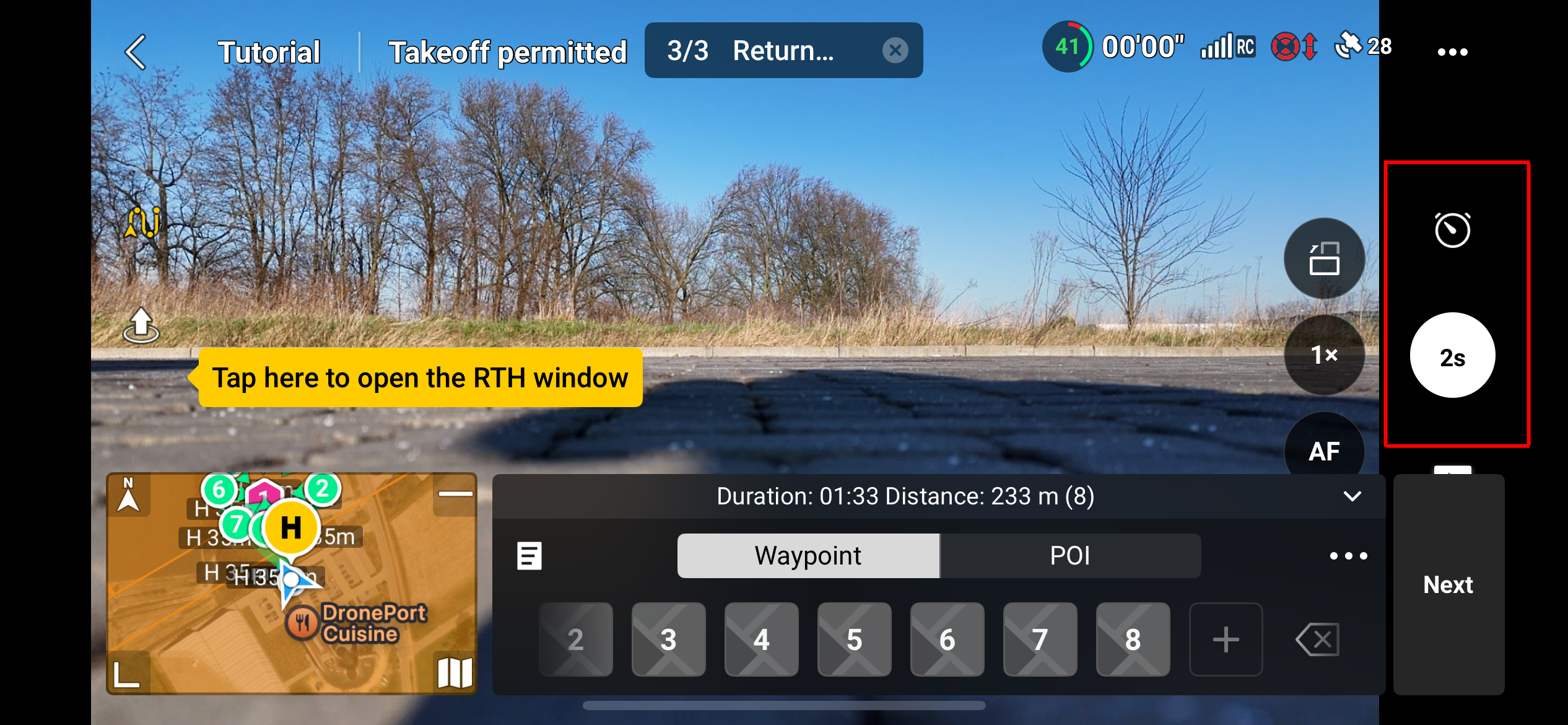
Controleer het gps-pictogram rechtsboven in het scherm. Het moet wit gekleurd zijn en niet rood. ![]()
Thuispositie
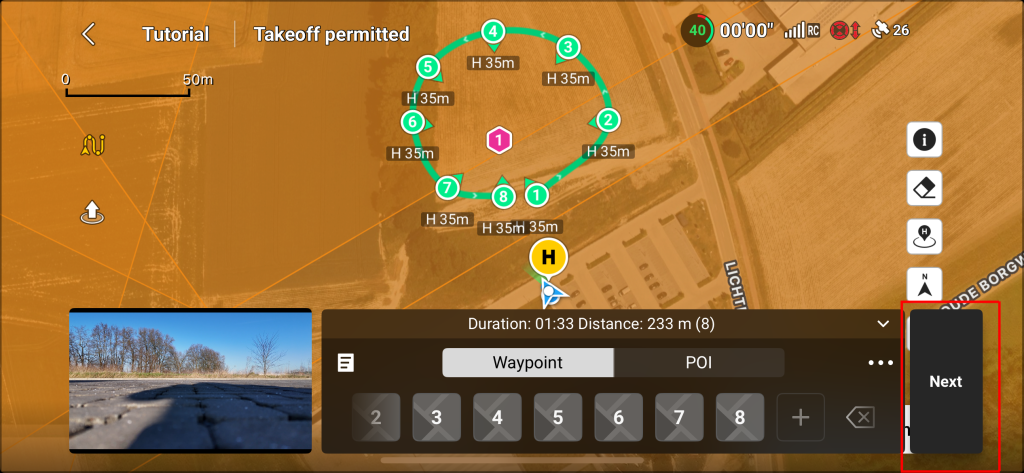
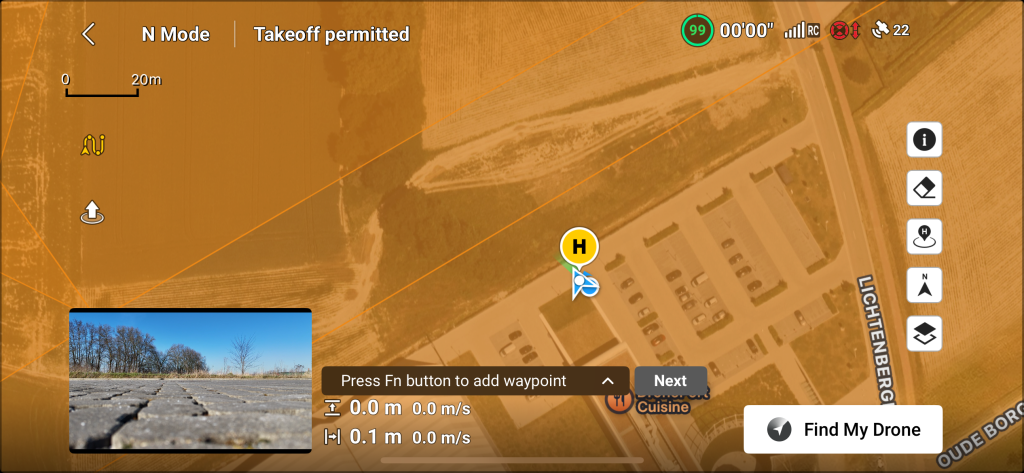
Zorg dat vóór het maken van de missie dat de drone een thuispositie heeft vastgelegd. De drone heeft zijn thuispositie vastgelegd als het icoontje in onderstaande afbeelding zichtbaar is op de kaart 




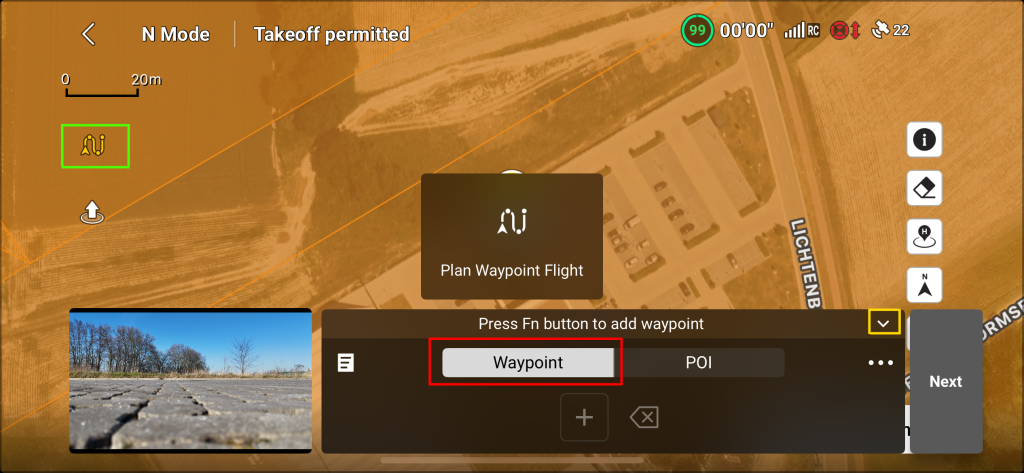
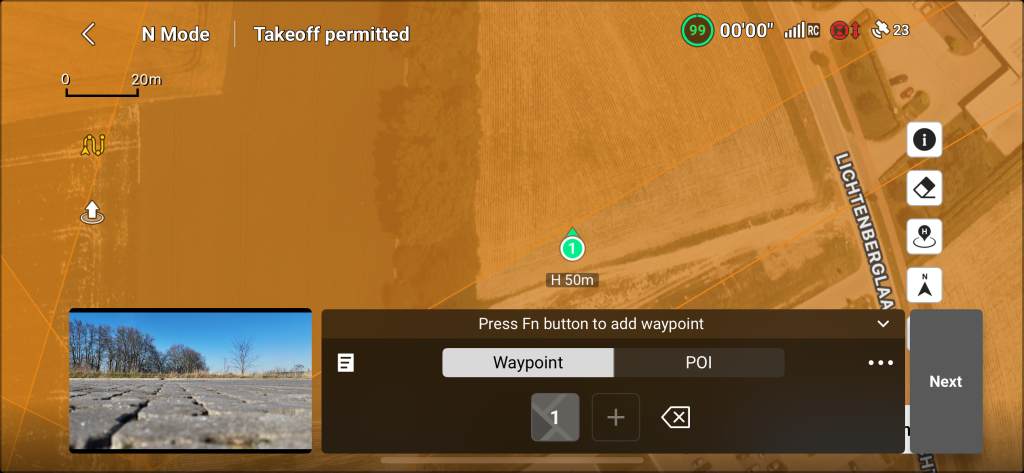
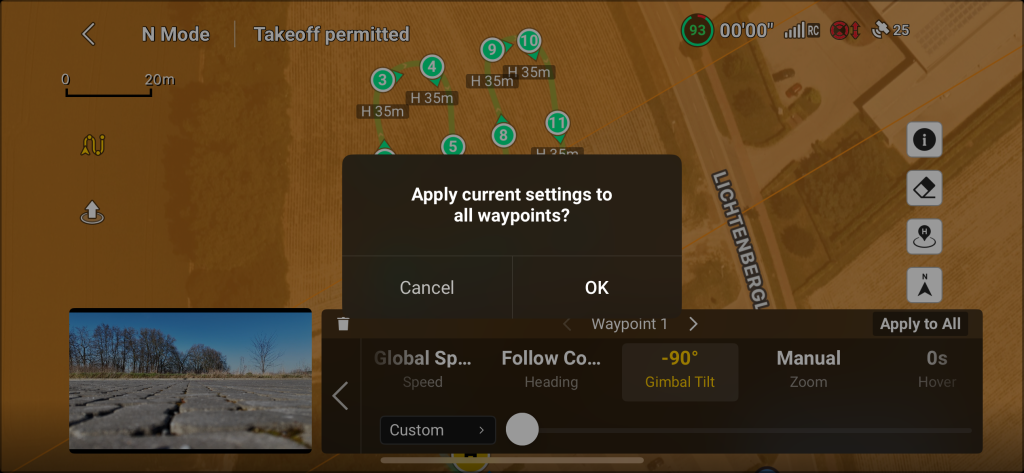
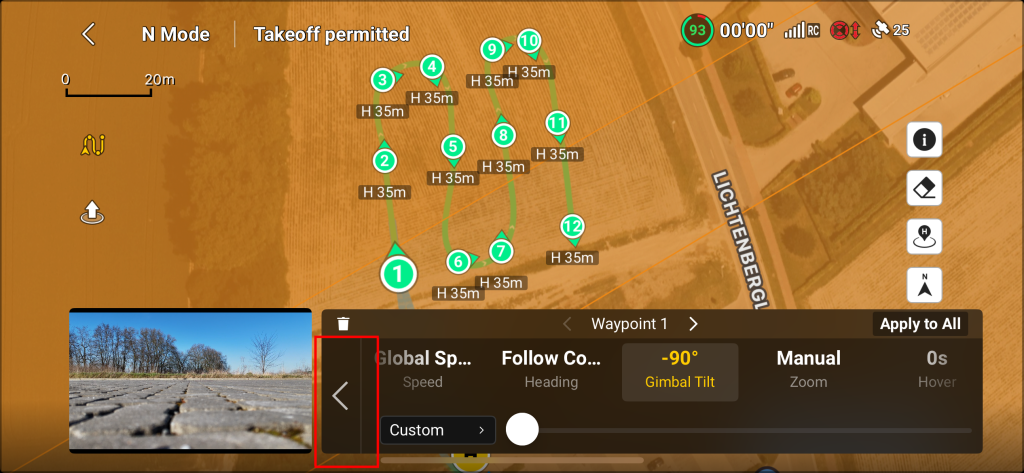

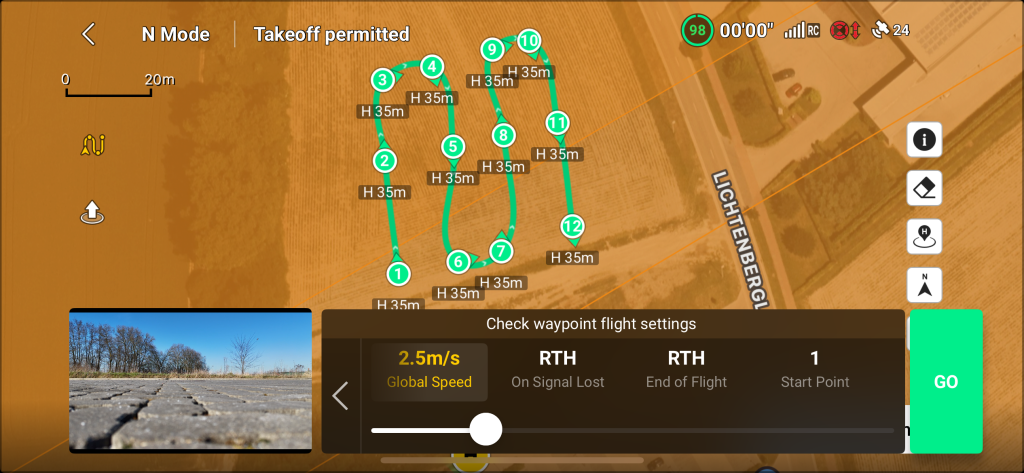
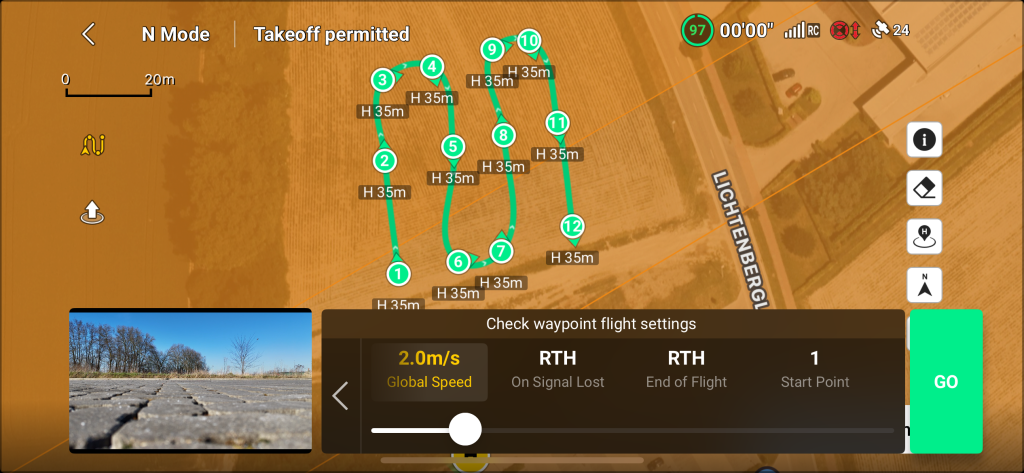
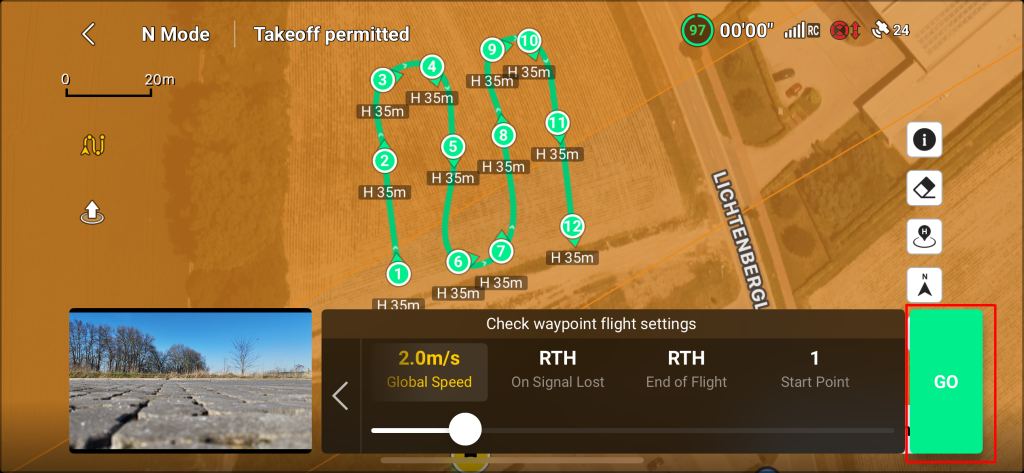
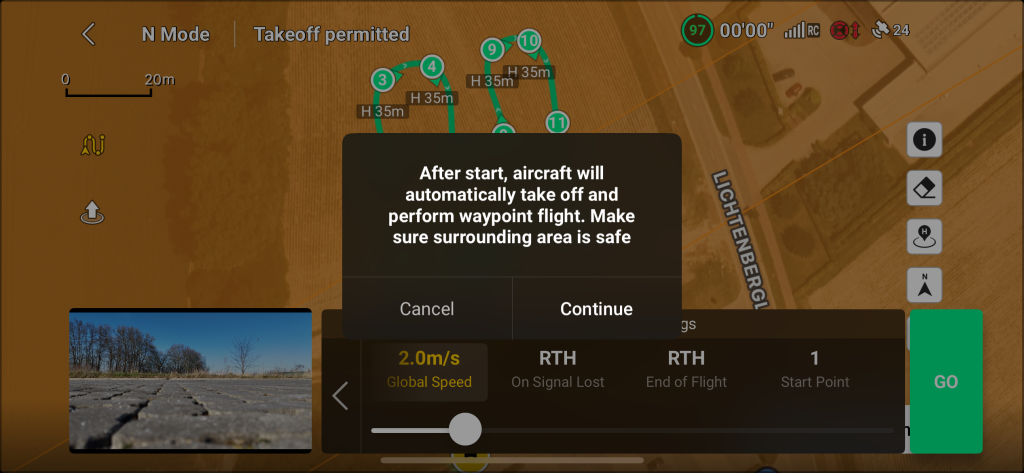


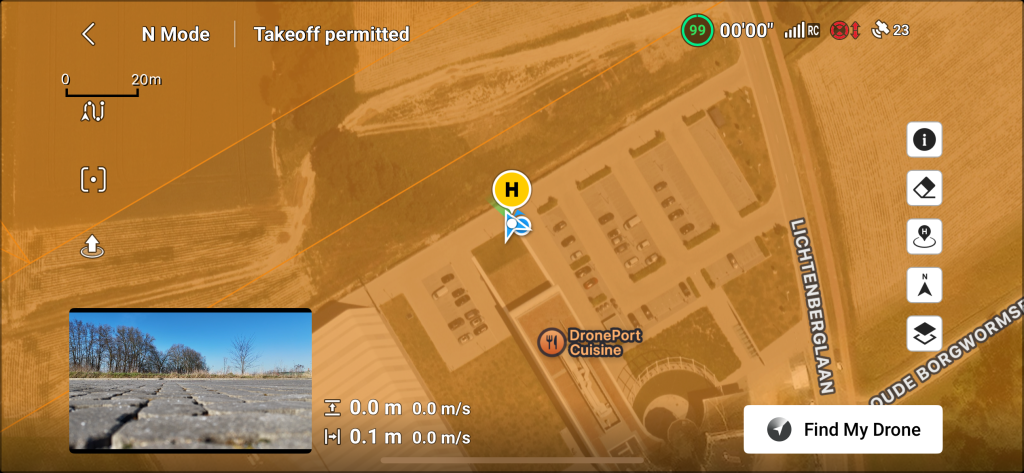
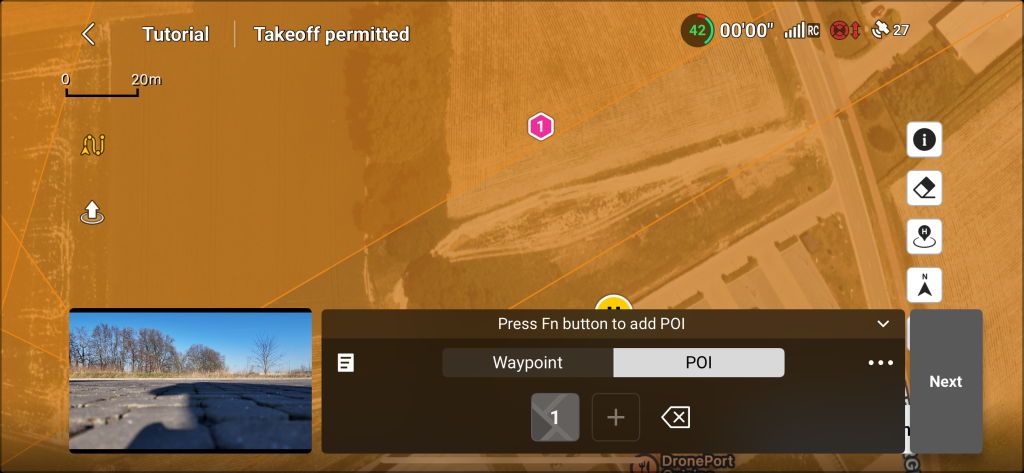



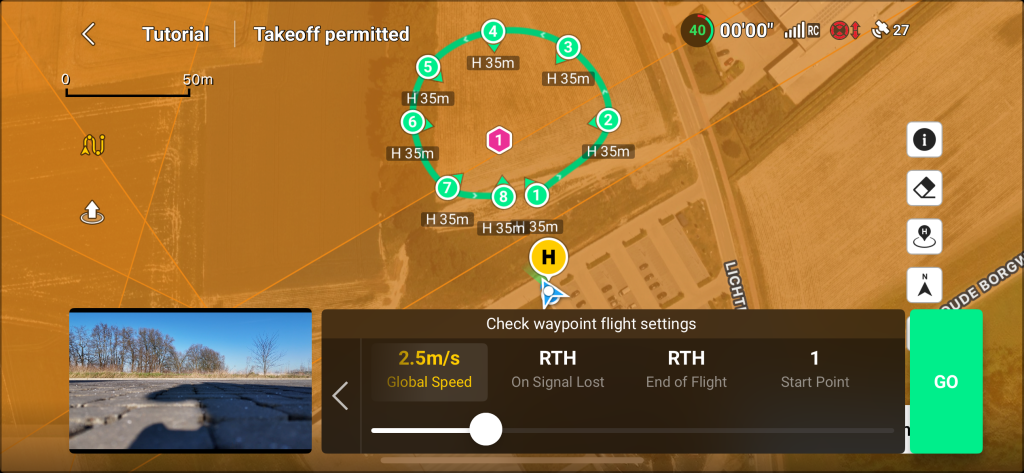
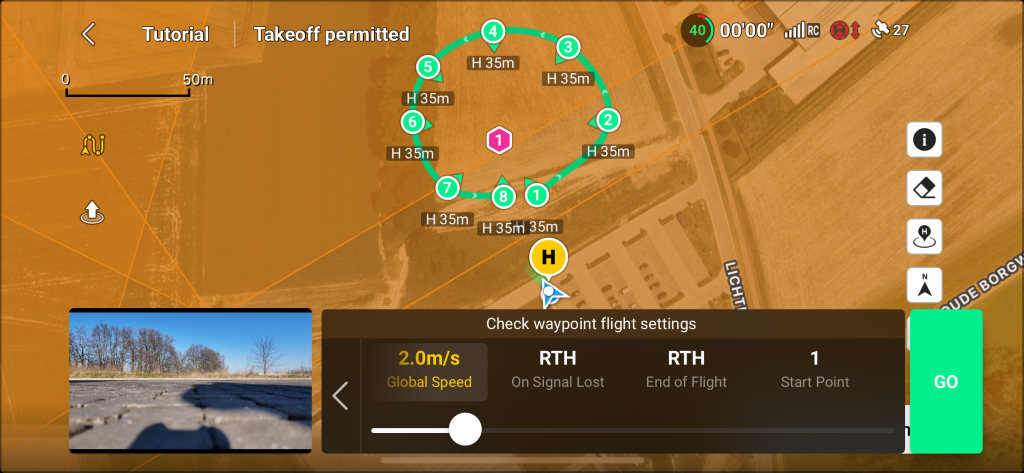
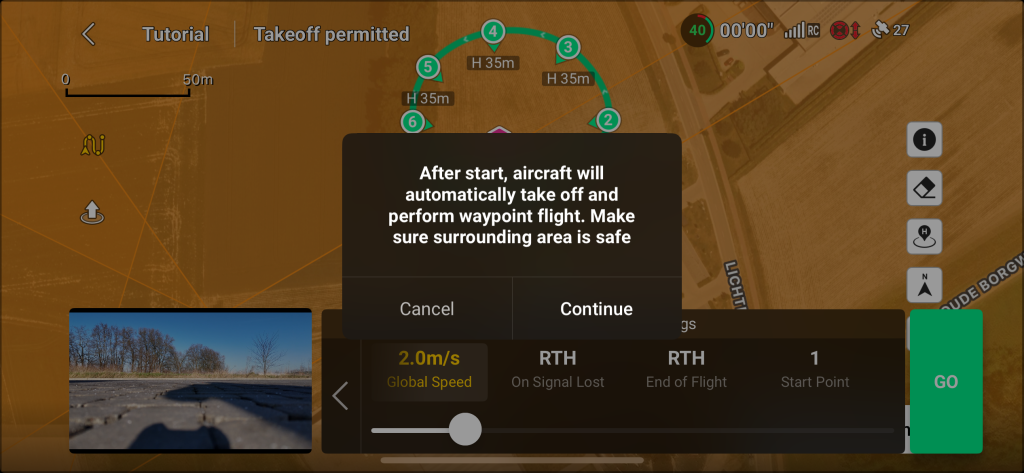
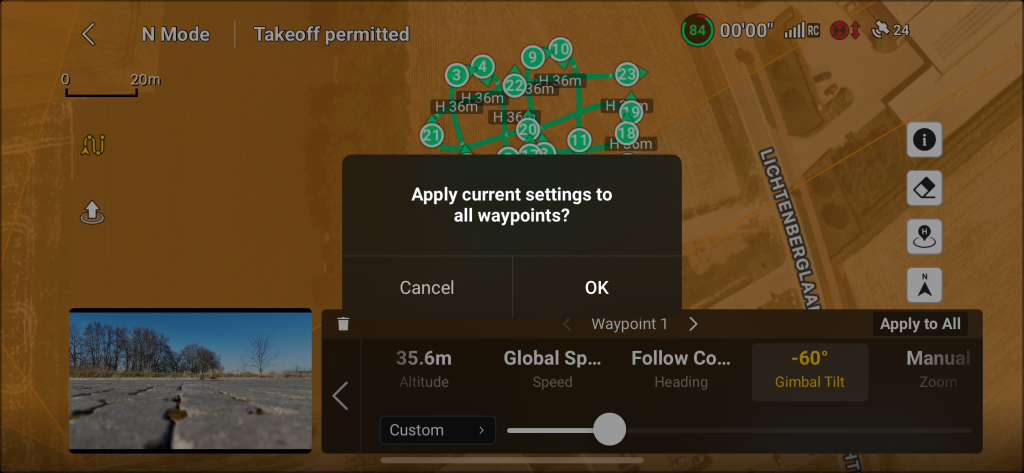
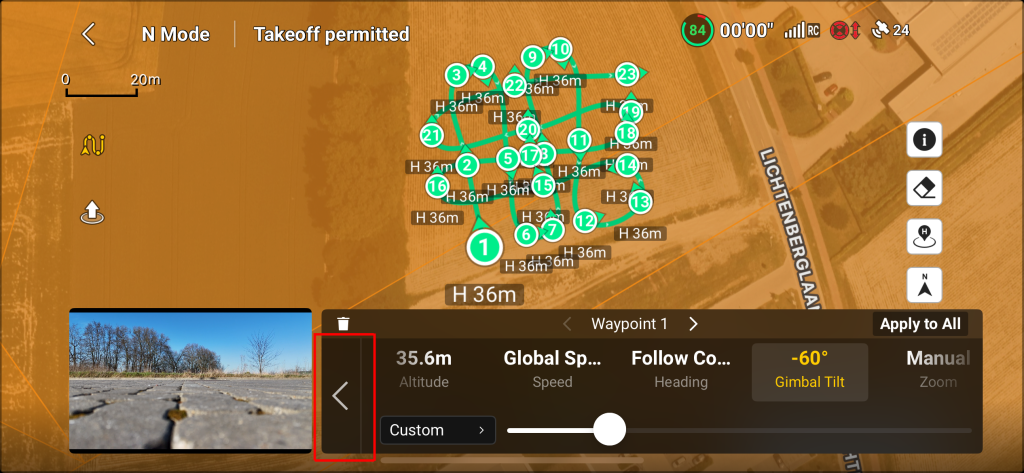
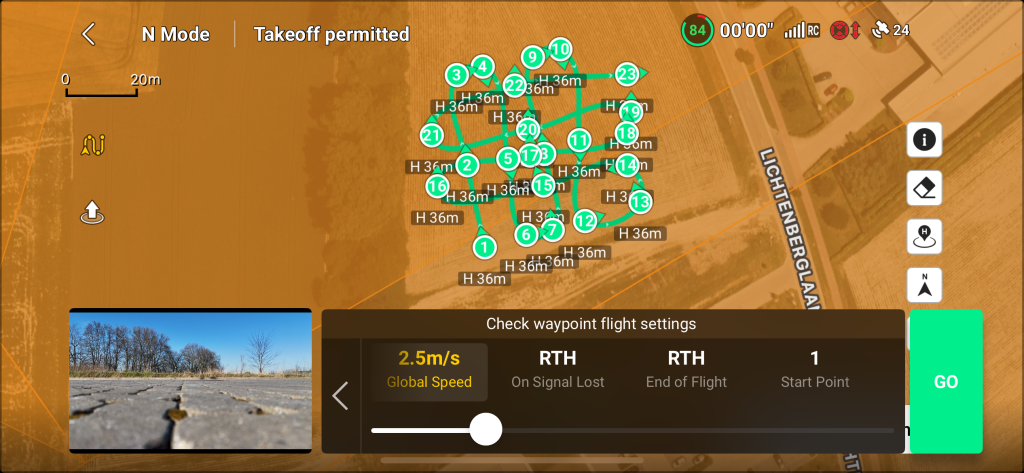
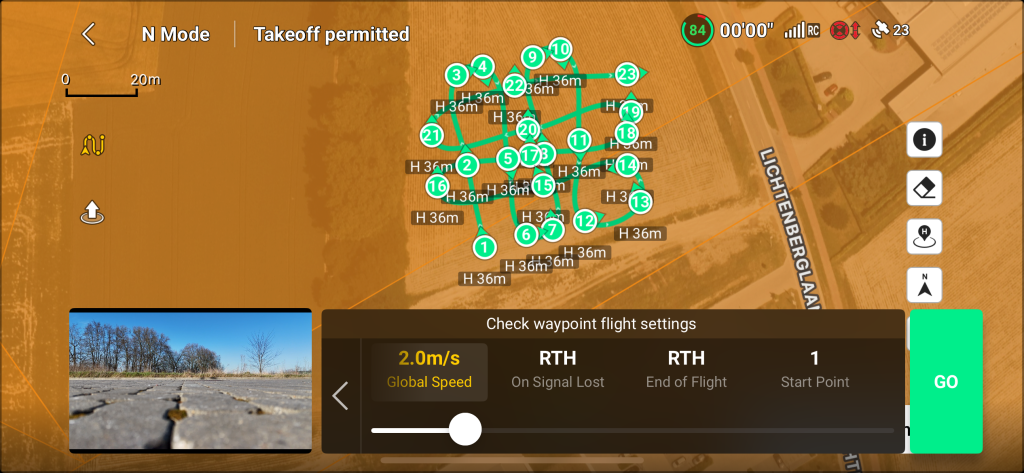
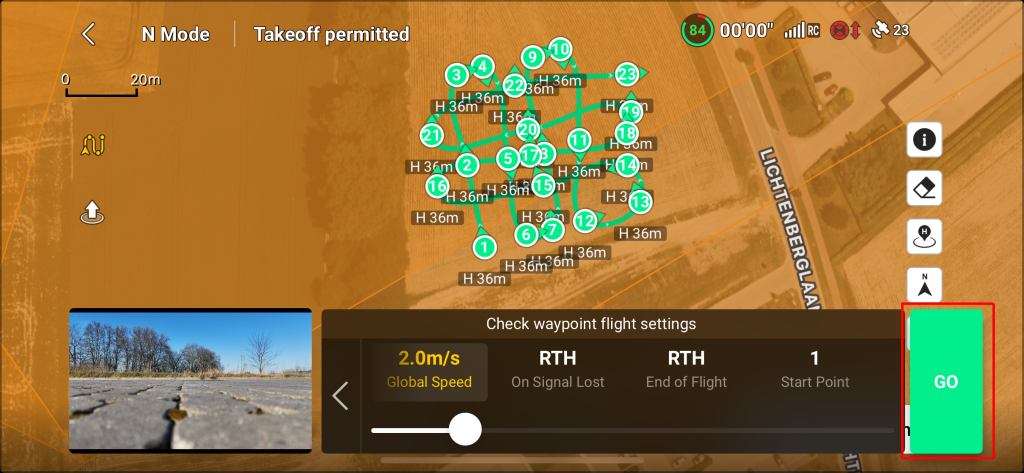
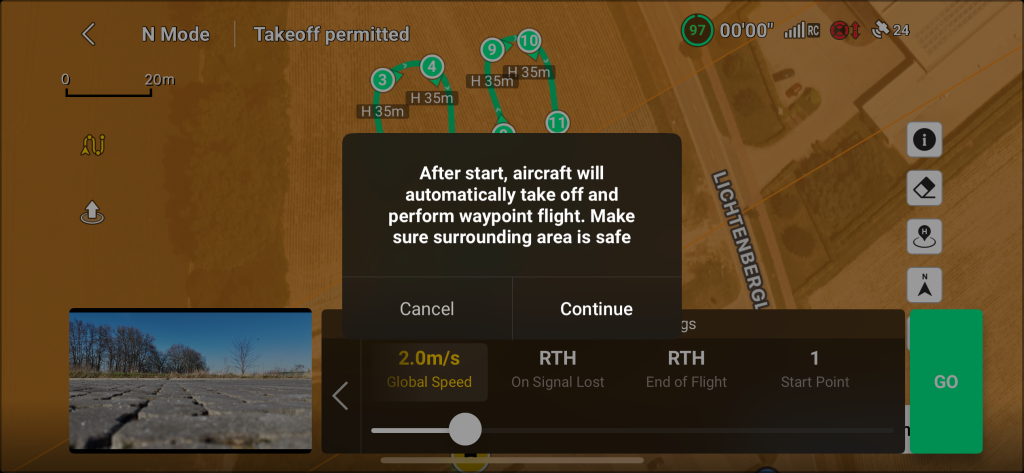
We zijn nu klaar om te gaan vliegen: