Inicio de sesión DJI
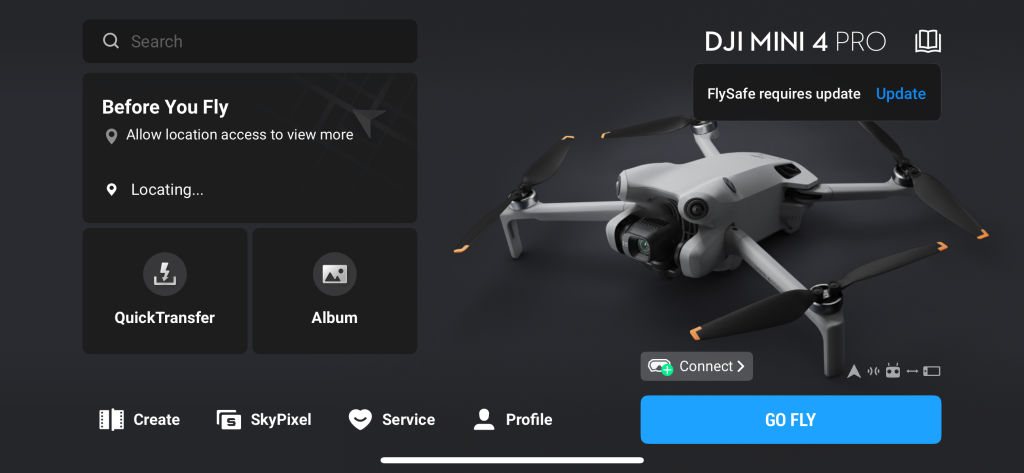
Asegúrese de estar conectado con una cuenta de dji. La aplicación Dji Fly no permitirá volar con la misión automática a menos que se haya iniciado sesión.

GPS
Antes de planificar una misión, asegúrate de tener suficiente señal de GPS.
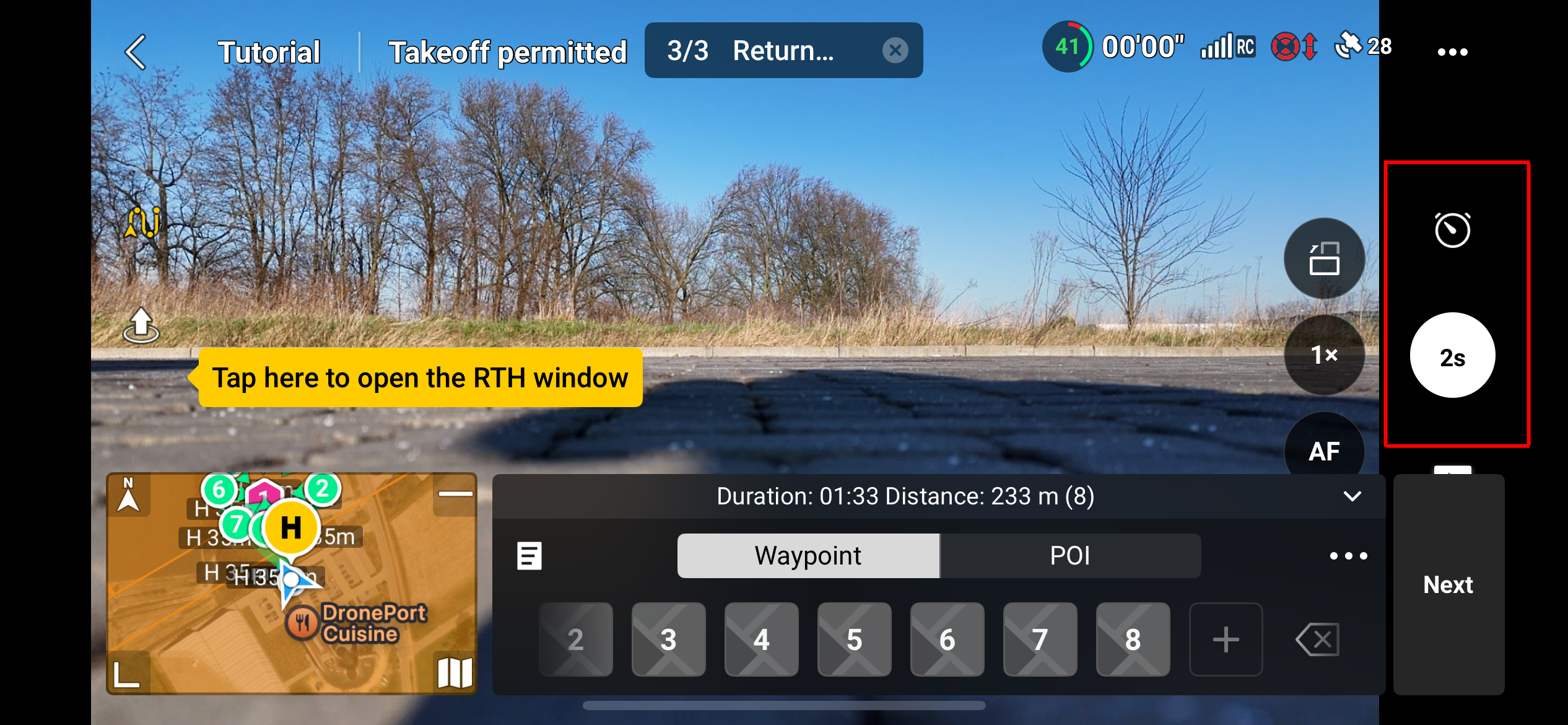
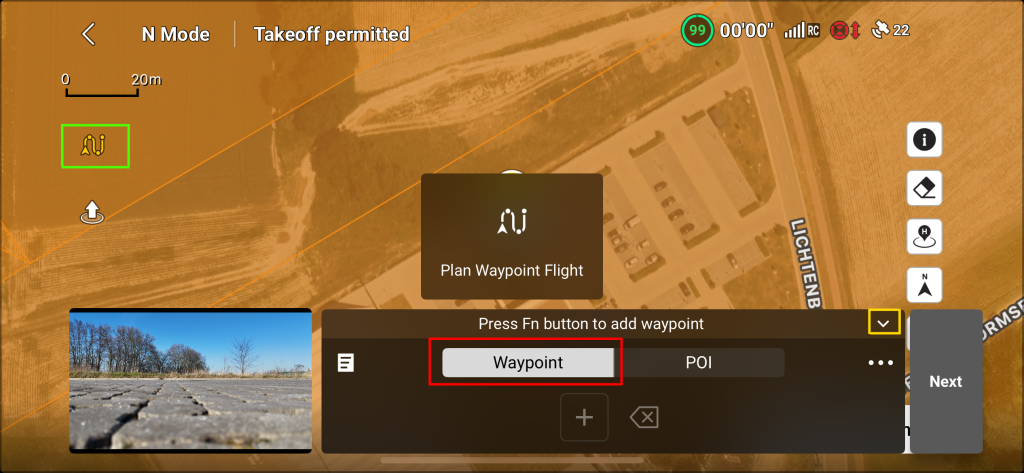
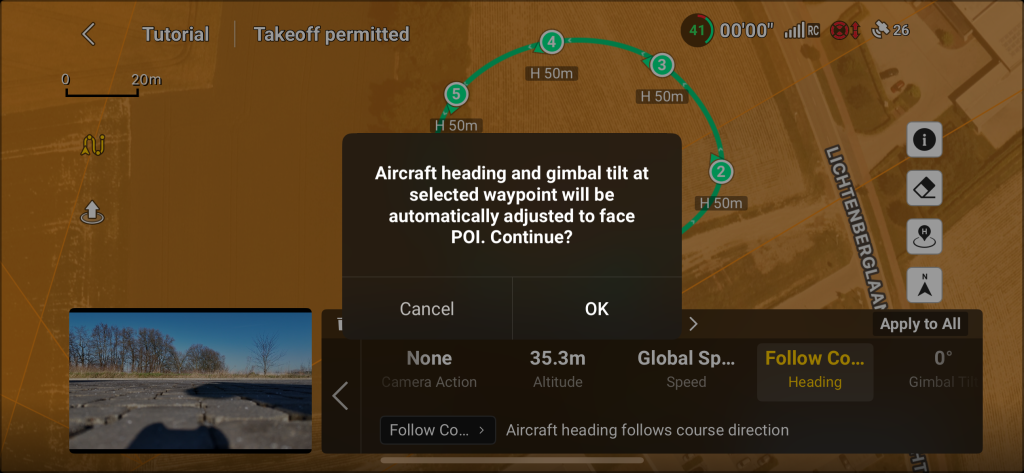
Compruebe el icono gps en la parte superior derecha de la pantalla. Tiene que ser de color blanco y no rojo. ![]()
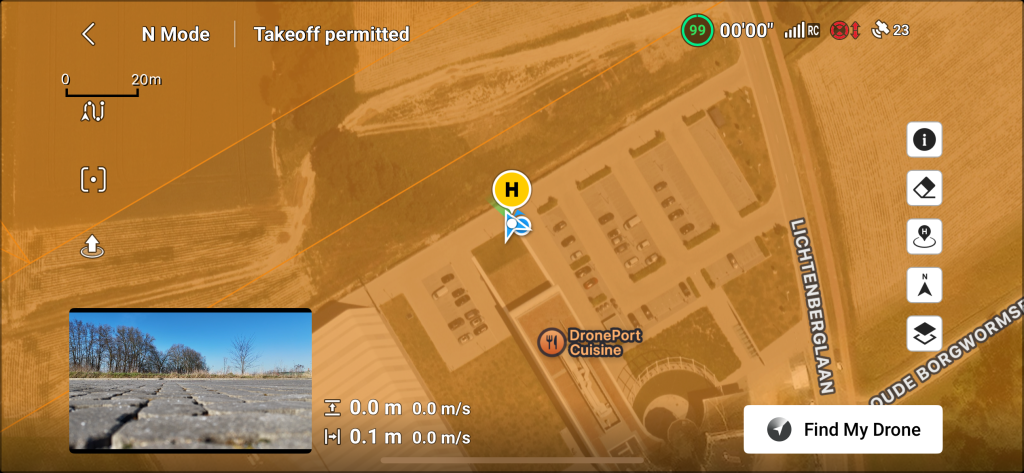
Posición inicial
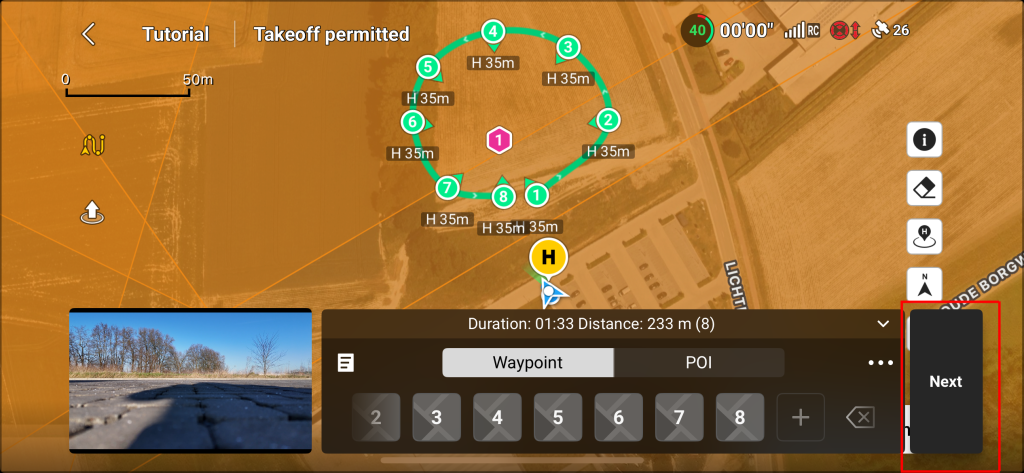
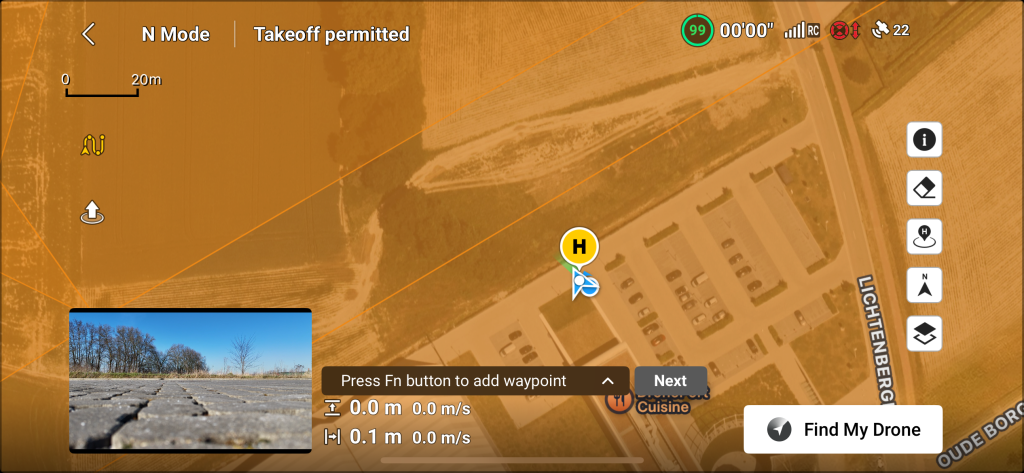
Antes de planificar, asegúrese de que el dron ha registrado una posición de inicio. El dron ha registrado su posición de inicio si el icono de la imagen inferior es visible en el mapa. 




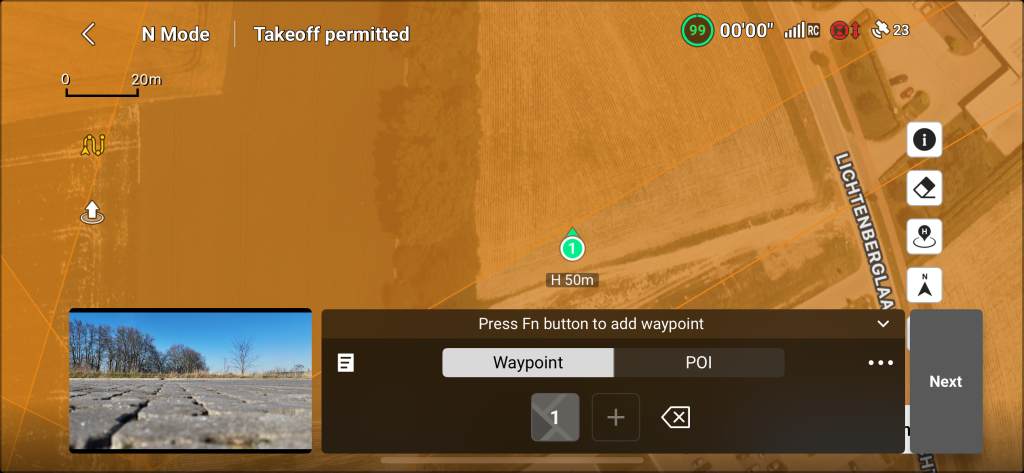
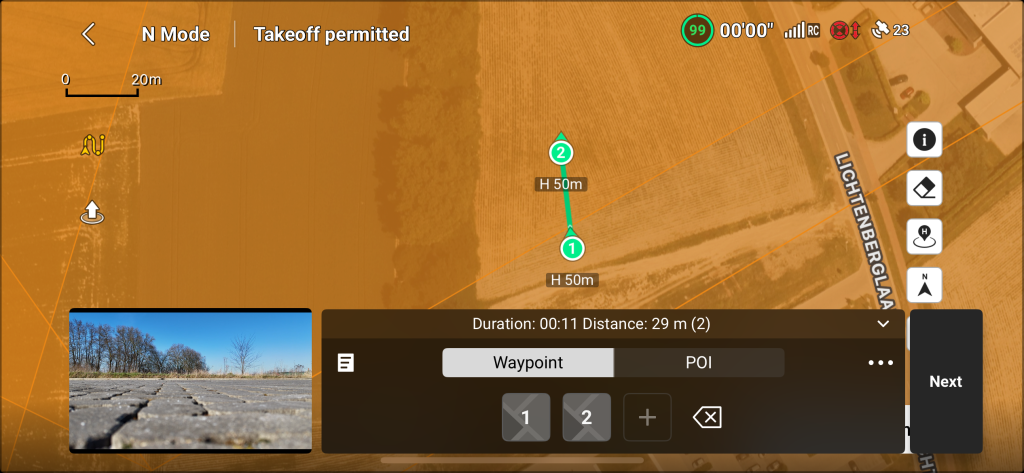
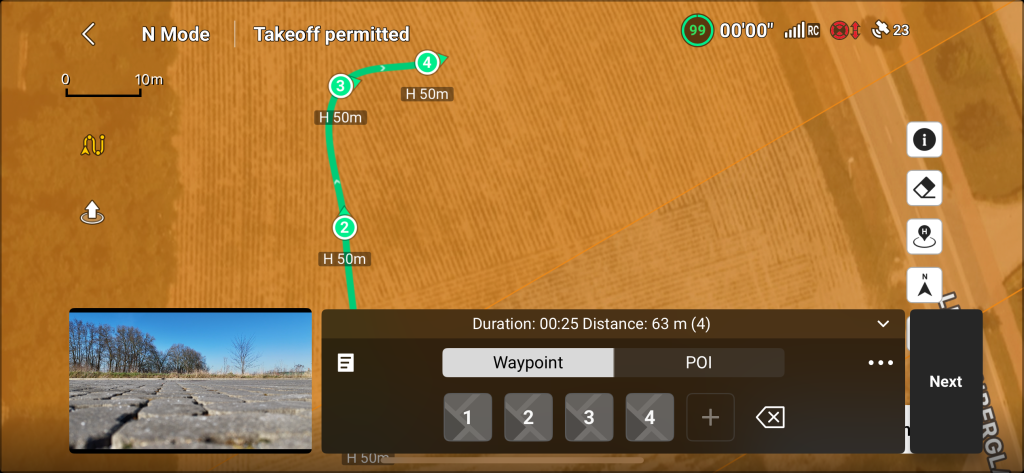
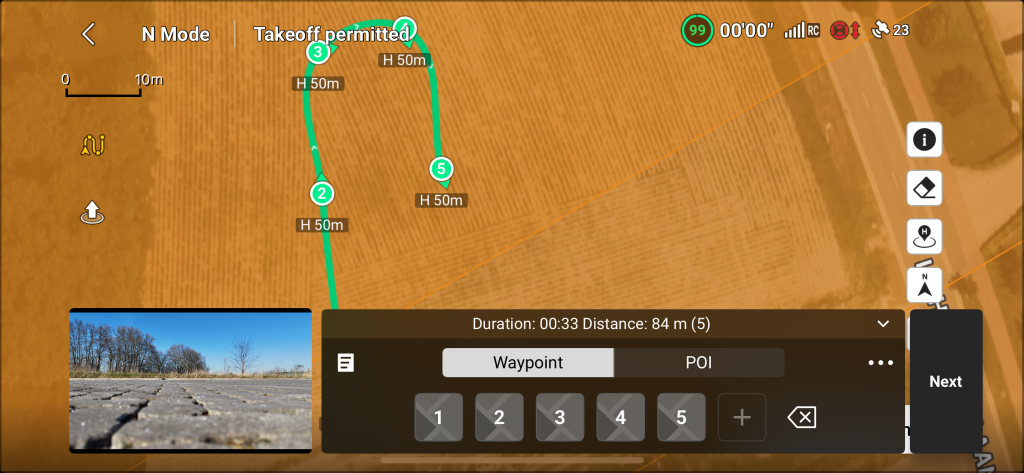
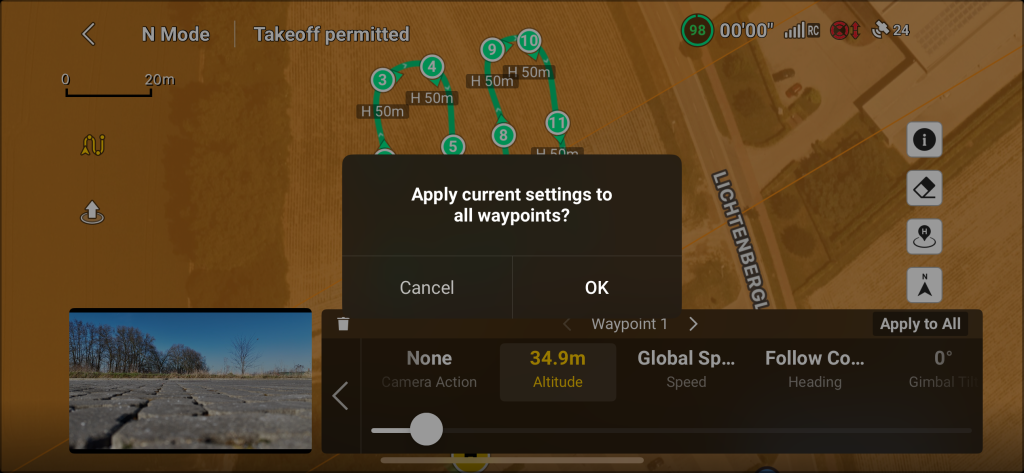
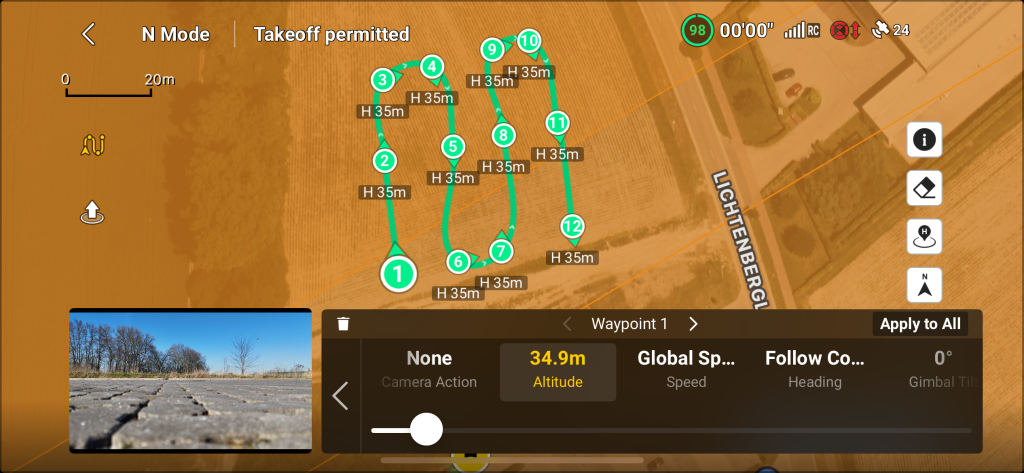
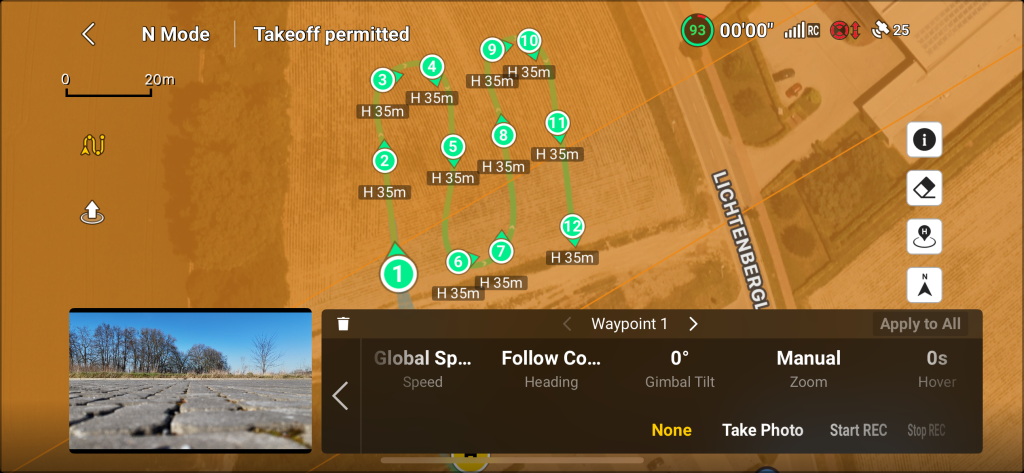
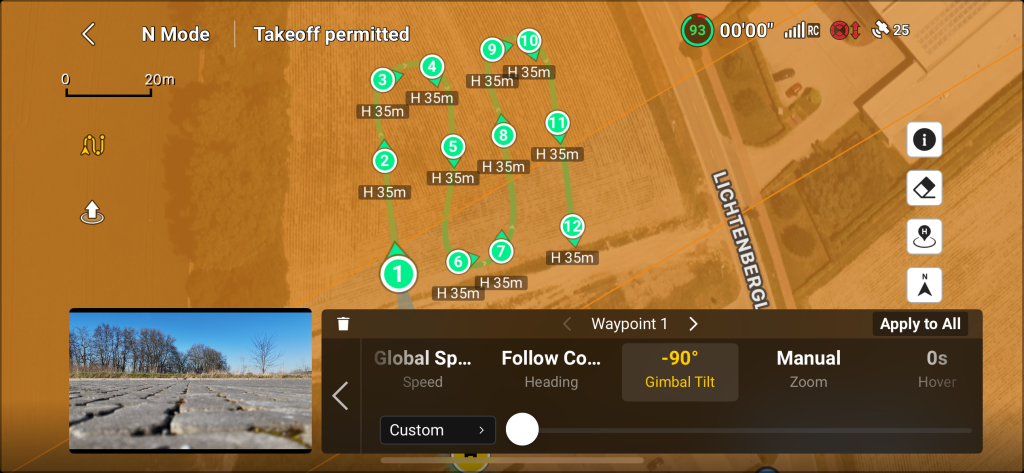
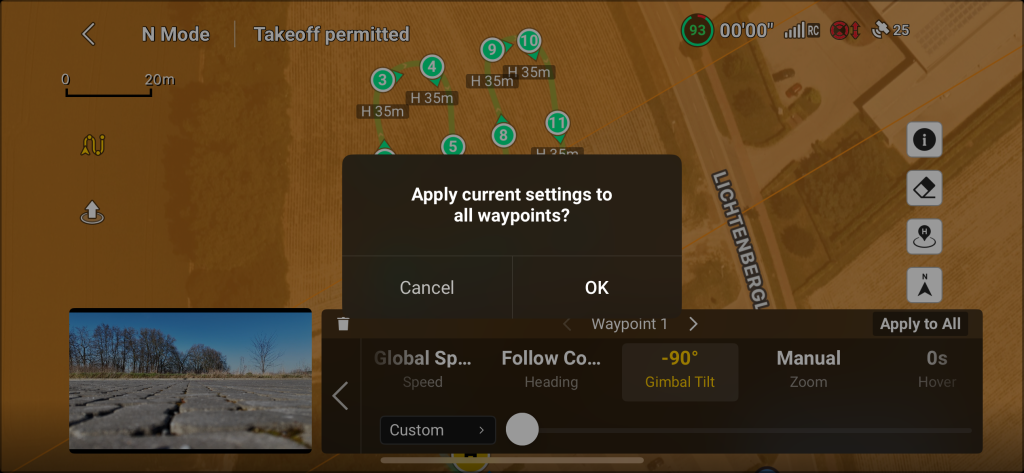
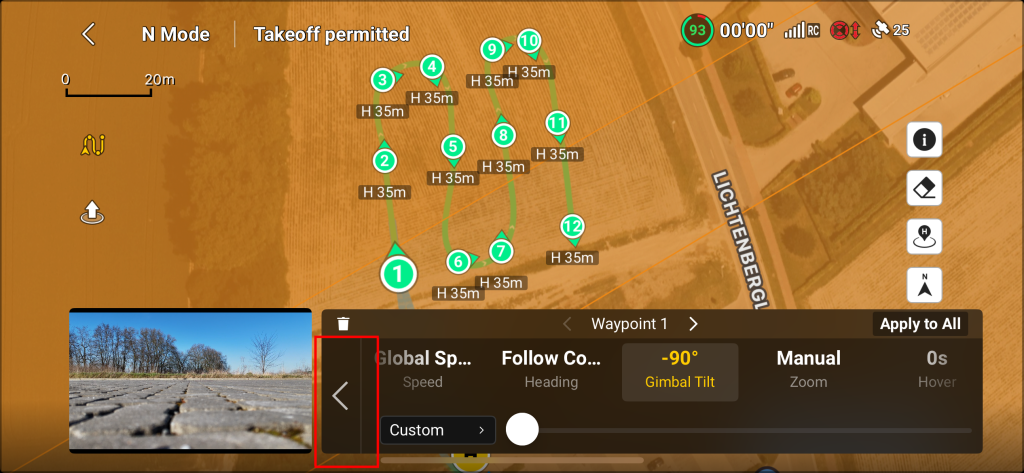

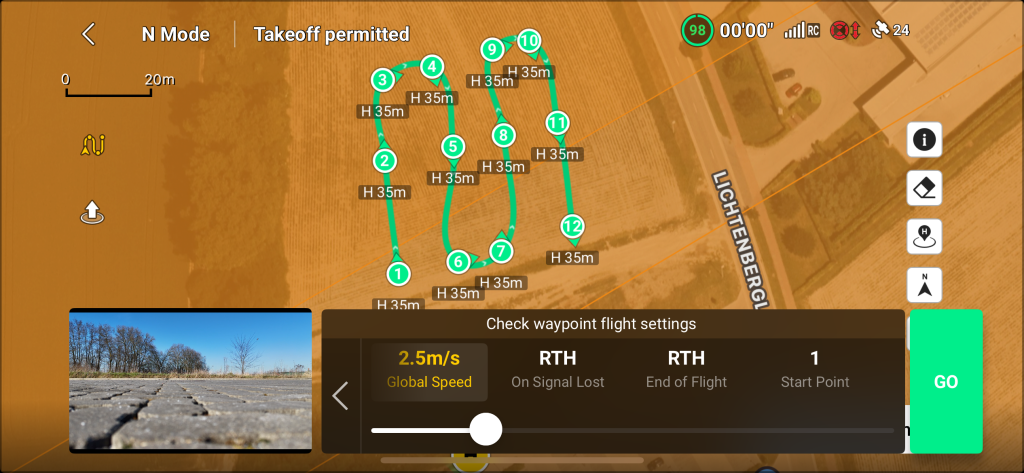
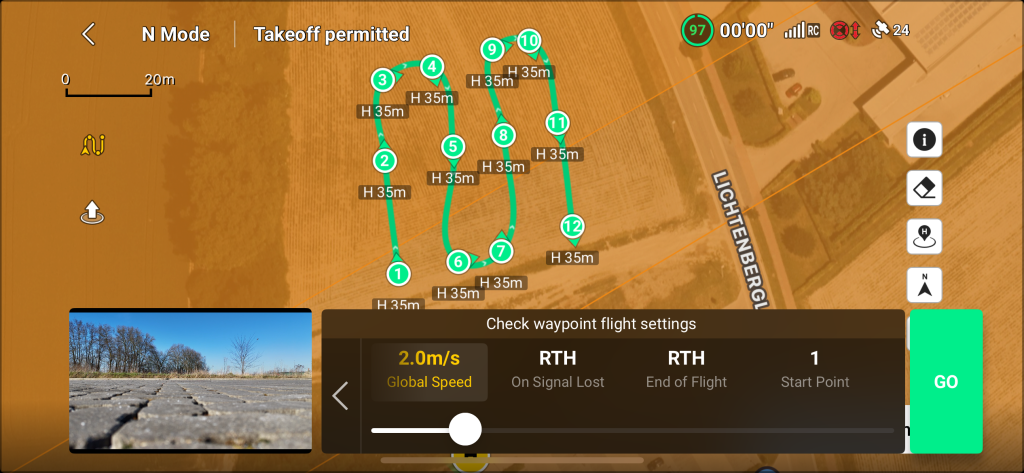
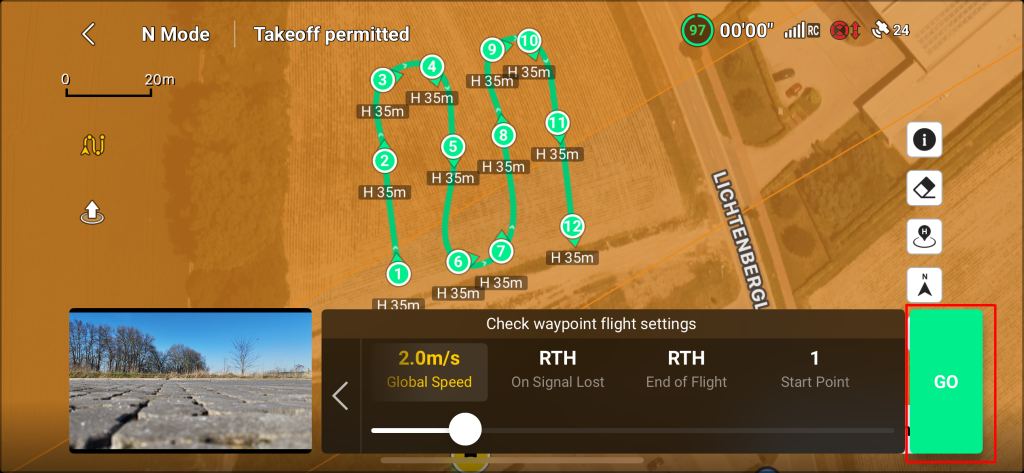
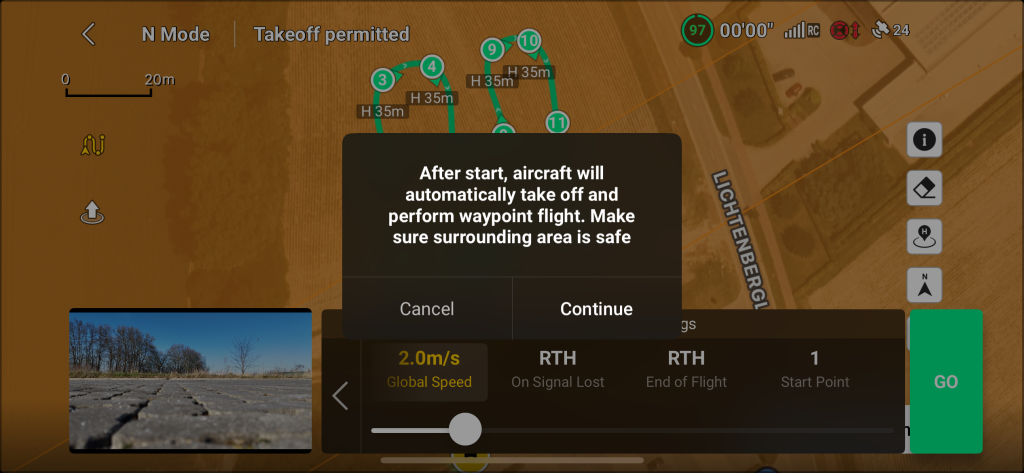





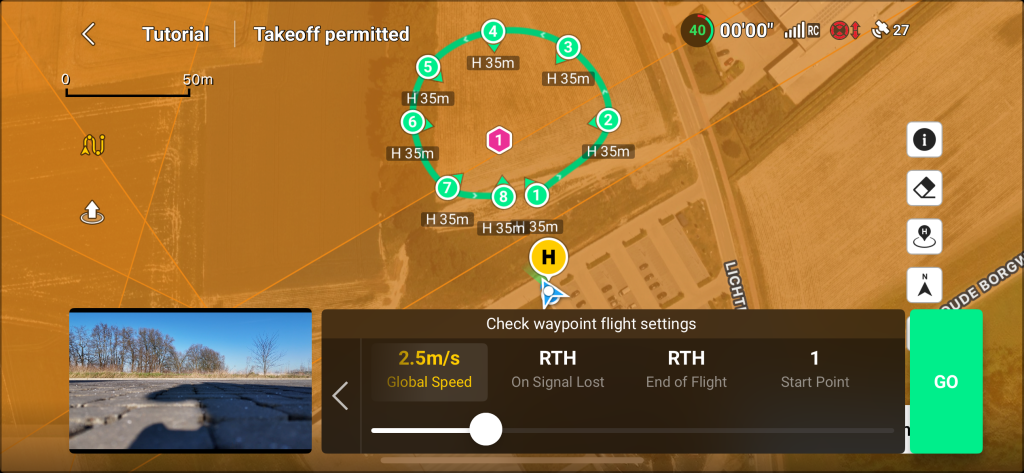
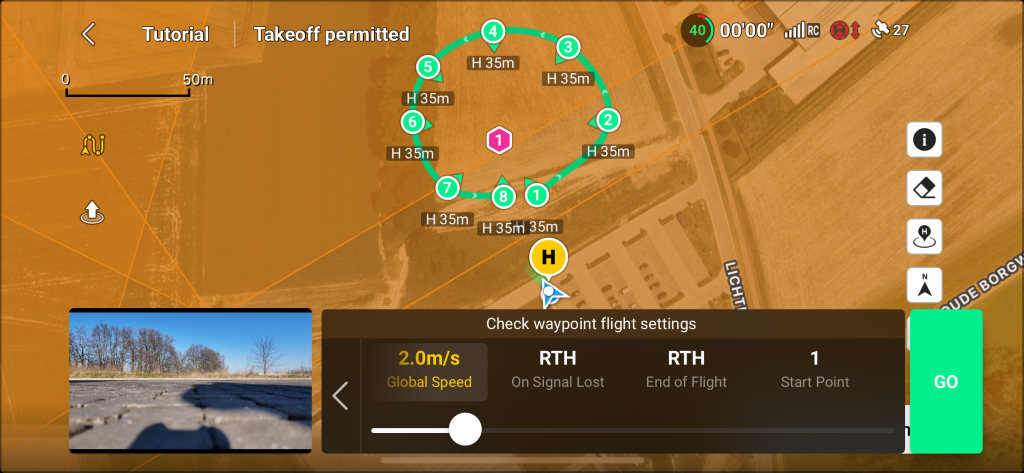
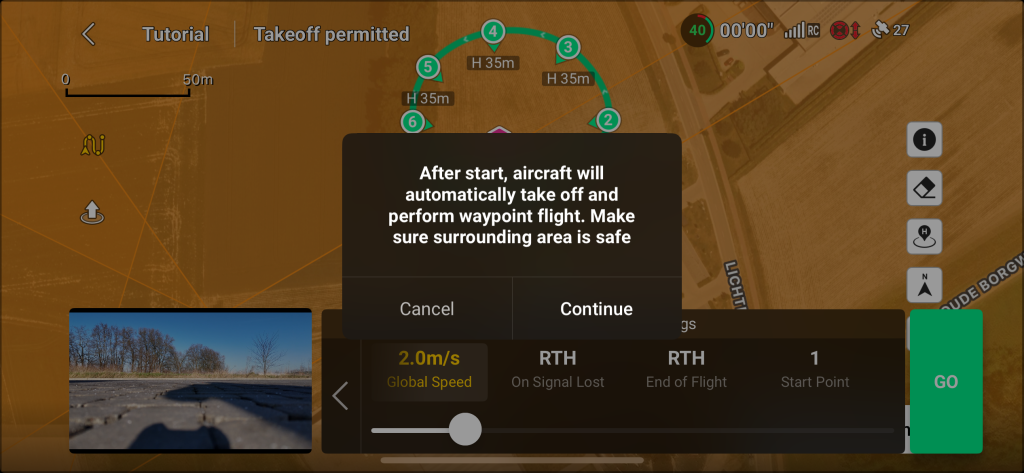
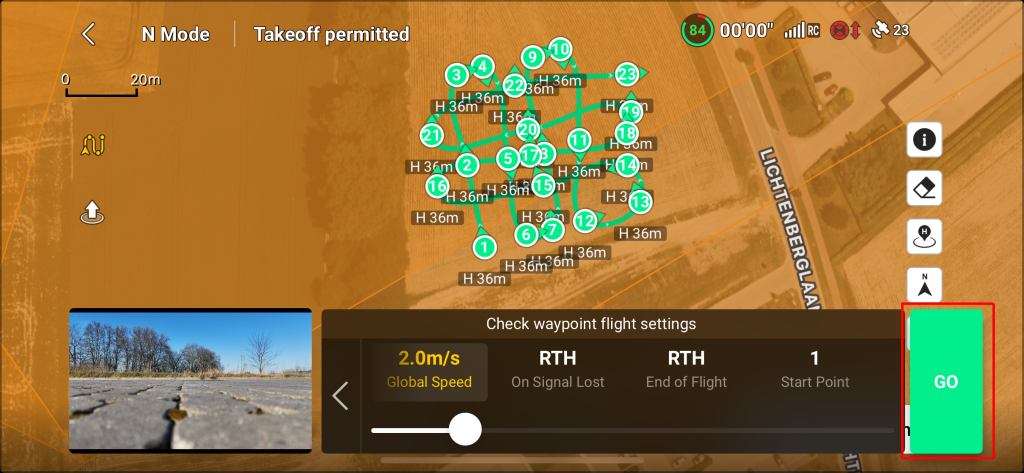
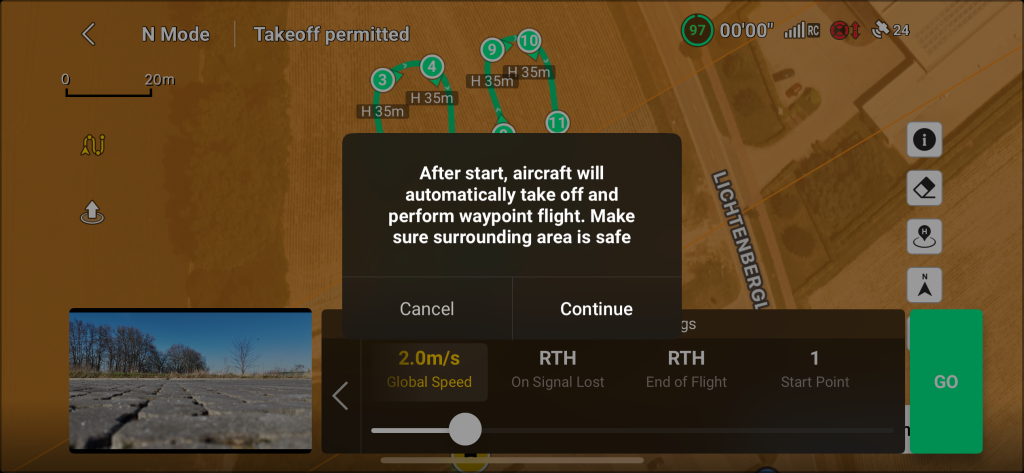
Estamos listos para volar ahora, por favor: